高级调试等级参数说明
本文介绍“3D匹配”步骤高级调试等级下可配置的参数项,以及各参数的作用说明和调节建议。
输入输出设置
| 参数 | 解释 |
|---|---|
输出类型 |
参数解释:该参数用于设置步骤输出的信息类型,可选择输出抓取点相关信息或工件中心点相关信息。 值列表:抓取点、工件中心点
默认值:抓取点 |
输入类型 |
参数解释:该参数用于设置步骤输入点云模板的方式。 值列表:默认、外部模板
默认值:默认 |
匹配模式
| 仅当所选工件的点云模板同时包含面点云和边缘点云时,才支持设置匹配模式。若点云模板中仅包含其中一种点云类型,该步骤将自动采用对应的匹配模式,无法手动切换。例如,当点云模板中仅包含边缘点云时,该步骤将默认使用边缘匹配模式,匹配模式相关参数将不可见。 |
| 参数 | 解释 |
|---|---|
自动设置匹配模式 |
参数解释:开启后,步骤将自动设置粗匹配模式和精匹配模式。 默认值:开启 |
粗/精匹配模式 |
参数解释:该参数用于设置匹配的模式。当不勾选自动设置匹配模式时,需设置该参数。 值列表:面匹配、边缘匹配
默认值:面匹配 调节建议:为了提高匹配准确性,可将粗匹配模式设置为边缘匹配,将精匹配模式设置为面匹配。 同时,还可根据工件特征和获取的点云质量调节该参数
|
粗匹配设置
| 参数 | 解释 |
|---|---|
运行方式 |
参数解释:该参数用于设定匹配过程的精度及速度之间的权衡。精度越高,耗时越长。 值列表:高速、标准、高精度、自定义 默认值:标准 |
期望的模板点云点数 |
参数解释:该参数用于设置期望的点云模板中点的数量。当运行方式为自定义时,需设置该参数。 默认值:300 调节说明:一般情况下,当使用面点云模板进行匹配时,需设置该参数。减小该值时,有利于提高匹配速度,但会降低匹配精度。 |
精匹配设置
| 参数 | 解释 |
|---|---|
运行方式 |
参数解释:该参数用于设定匹配过程的精度及速度之间的权衡。精度越高,耗时越长。 值列表:高速、标准、高精度、超高精度、自定义 默认值:标准 调节建议:对于抓取精度要求较高的场景,建议将运行方式设置为自定义,然后手动设置采样间隔。 |
采样间隔 |
参数解释:该参数值越大,采样后点云中的点数越小,点云越稀疏。因此,匹配精度会降低。而参数值越小,运行时间越长。 默认值:5.000 mm |
最大迭代次数 |
参数解释:该参数值越大,匹配精度越高,处理速度越慢。 默认值:40 |
标准偏差衰减更新步数 |
参数解释:该参数用于标准偏差微调。 默认值:3 |
偏差矫正能力 |
参数解释:该参数用于设置对粗匹配结果的纠偏能力大小。能力越大,越能把与实际物体位姿偏离较远的粗略位姿纠正为精确位姿。但如果纠偏能力过大,会导致精度损失。 值列表:小、中、大 默认值:小 调节建议:如果粗匹配后获得的位姿与实际物体位姿偏离较远,可将偏差矫正能力设置为大。 |
额外精匹配
| 仅当所选工件的点云模板同时包含面点云和边缘点云时,才可进行额外精匹配。 |
| 参数 | 解释 |
|---|---|
使用额外精匹配 |
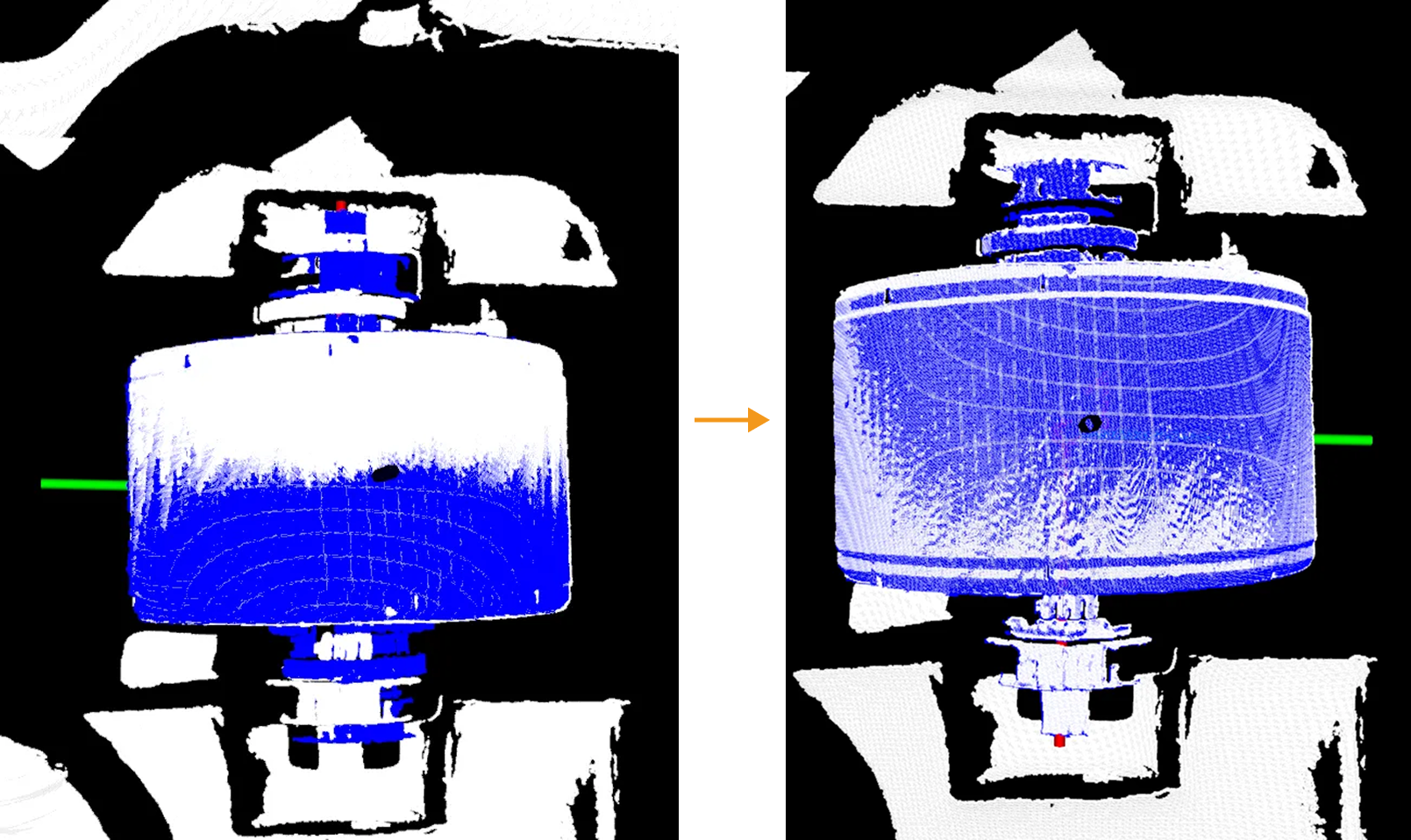
参数解释:开启后,将使用不同的模式再次进行精匹配。例如,当前精匹配模式为面匹配,则开启该功能后将使用边缘模式再次进行精匹配。开启该功能后,最终的匹配精度可能会提高,但运行时间会略微增加。 默认值:关闭 调节建议:请根据实际情况决定是否开启该功能。若选择开启该功能,需确保额外精匹配所用的面/边缘点云模板准确合理。 |
调整或过滤粗匹配后的位姿
| 参数 | 解释 | ||
|---|---|---|---|
使用基于位姿距离的非极大值抑制 |
参数解释:开启后,若候选位姿与已选定位姿的距离小于物体直径的 0.1 倍,则该候选位姿将被滤除。 默认值:开启 |
||
自动设置模板旋转角度上限 |
参数解释:开启后将自动设置模板旋转角度上限。主要用于过滤与工件正反匹配错误的位姿。 默认值:开启 |
||
模板旋转角度上限 |
参数解释:当点云模板匹配至场景点云时,根据模板绕 X 轴或 Y 轴的旋转角度过滤位姿。当模板旋转角度超过模板旋转角度上限时,该位姿将被过滤。 默认值:135.00° |
||
调整粗匹配朝向 |
参数解释:该参数用于选择调整或过滤粗匹配位姿的策略。 值列表:无、统一圆形工件位姿的X轴朝向、根据工件对称性尝试匹配 默认值:无 调节说明:如需使用根据工件对称性尝试匹配参数,需在工件库的点云模板配置中开启配置点云模板功能,然后选择计算位姿以过滤匹配结果并进行相关设置。具体说明参见下文 “调整粗匹配朝向的各选项说明”。
|
||
X轴朝向 |
参数解释:该参数用于指定 X 轴朝向,以矫正位姿。选择统一圆形工件位姿的X轴朝向时,需设置该参数。 默认值:0.00° |
||
基准角度 |
参数解释:工件库中保存的物体中心点 X 轴朝向定义为 0°,逆时针绕物体中心点 Z 轴旋转的角度为基准角度。如果识别到的物体位姿 X 轴朝向不在 [基准角度 ± 范围] 内,该位姿将被舍弃。选择根据工件对称性尝试匹配时,需设置该参数。 默认值:0.00° |
||
范围 |
参数解释:该参数用于设置基于对称性过滤位姿时的角度容差范围。选择根据工件对称性尝试匹配时,需设置该参数。 默认值:180.00° |
||
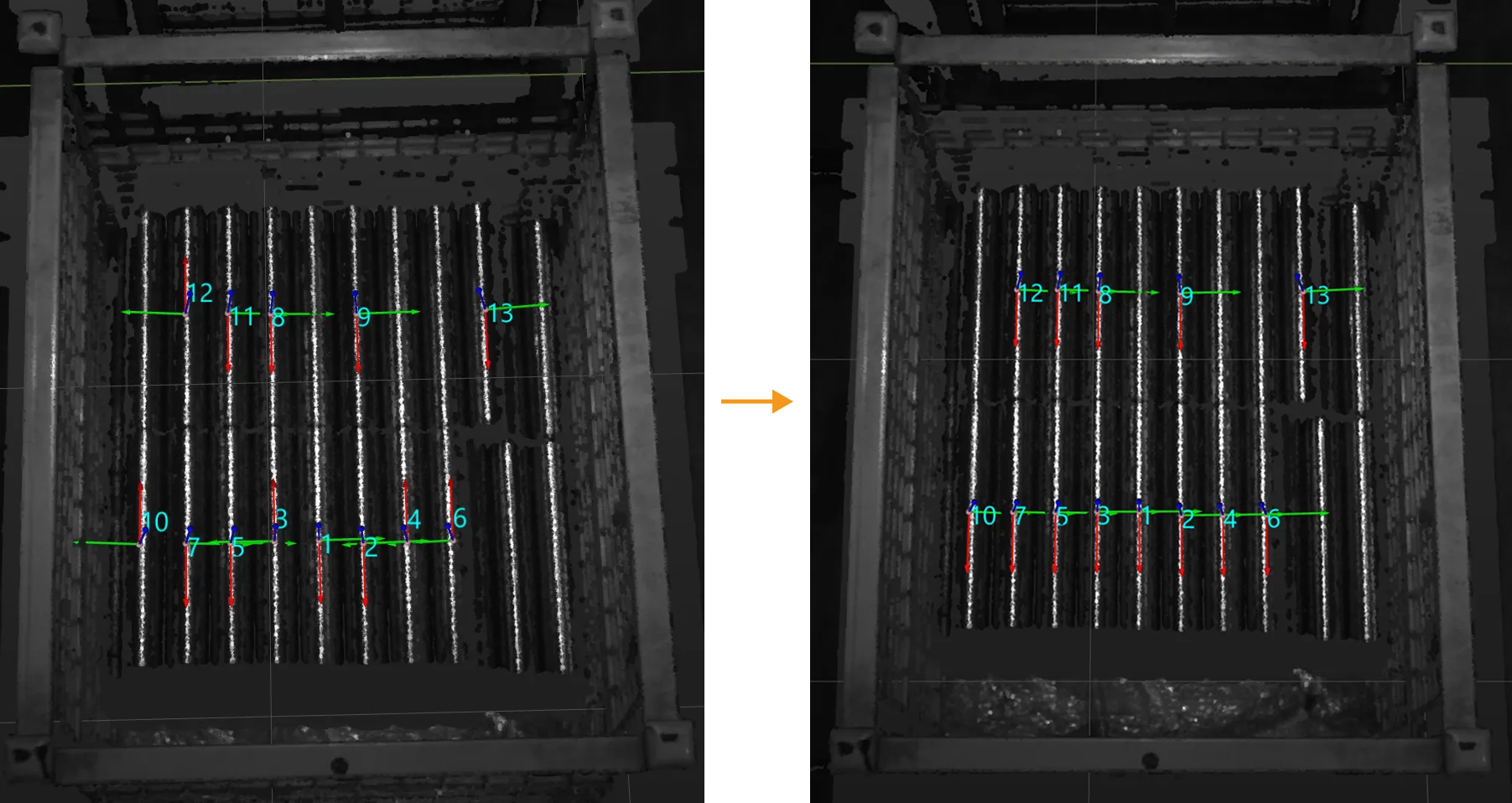
启用长条物体增强 |
参数解释:长条形工件(如连杆、轴、螺栓等)在匹配过程中容易在物体长轴方向上出现错位,导致工件两端与点云模板对齐不准确。开启该功能后,匹配算法将加强对长条形工件长轴方向的约束,从而提高长条形工件的匹配精度和稳定性。当识别结果出现长条形工件沿长轴方向偏移或旋转不准确的情况时,可尝试开启该功能。 调节建议:开启该功能会增加计算耗时,建议仅在识别长条形工件时开启。若识别其他形状工件,建议关闭以获得更快的处理速度。 默认值:关闭 |
调整粗匹配朝向的各选项说明如下。
| 选项 | 说明 | 调节示例 |
|---|---|---|
无 |
不使用“调整或过滤粗匹配位姿”功能。 |
|
统一圆形工件位姿的X轴朝向 |
将粗匹配得到的位姿 Z 轴固定,然后将 X 轴旋转至指定方向。该参数一般应用于圆对称工件(如圆环、刹车盘等),令工件位姿 X 轴指向同一方向。 |
|
根据工件对称性尝试匹配 |
使用工件库中计算出的可能匹配错误的结果和手动设置的对称性辅助匹配,从而过滤粗匹配位姿。主要适用于以下两种场景:
|
|
置信度设置
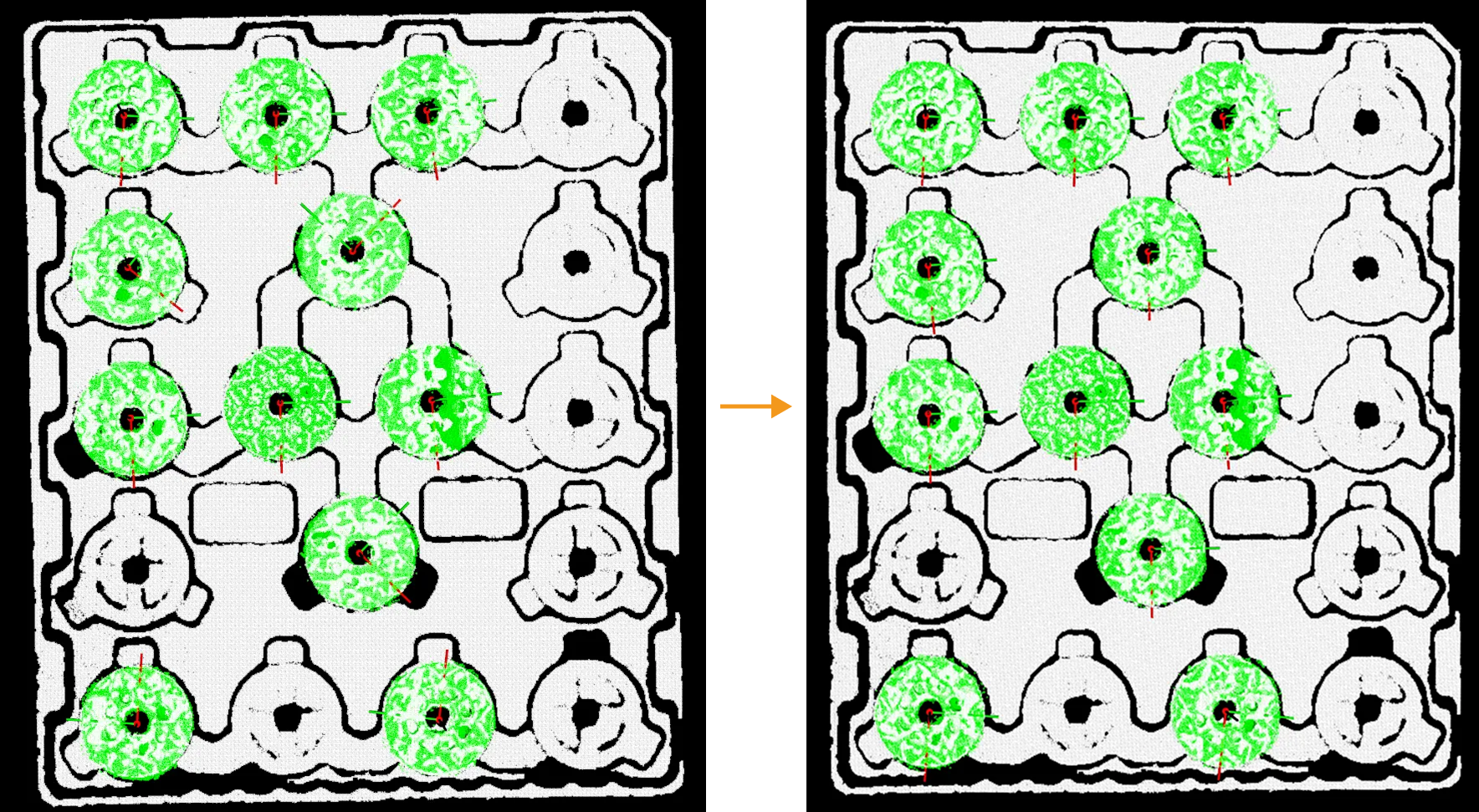
在 3D 匹配过程中,该组参数用于评估和筛选匹配结果,以保障匹配精度和稳定性。例如,合理设置该组参数,可保证最上层正常摆放的工件均能被准确识别。
首先,该步骤根据设置的结果验证等级对匹配结果进行评估,计算匹配结果的置信度。然后将置信度与置信度阈值进行比较,筛选出合格的匹配结果。
| 匹配结果的置信度 = 点云模板与待匹配的场景点云的重合比例。 |
| 参数 | 解释 |
|---|---|
结果验证等级 |
参数解释:该参数用于设置评估匹配结果的严格程度。 值列表:低、标准、高、超高、自定义 默认值:标准 调节建议:一般情况下,推荐选择“标准”。当场景点云和点云模板难以区分时,可选择较高的结果验证等级。 |
搜索半径 |
参数解释:该参数用于判断点云模板和场景点云的重合程度。搜索半径越小,匹配结果置信度越低;搜索半径越大时,匹配结果置信度越高。当结果验证等级为自定义时,需设置该参数。 默认值:10.000 mm 调节建议:若匹配结果验证分数偏低,可适当调高该参数;若匹配结果验证分数偏高,可适当调低该参数。 |
采样间隔 |
参数解释:设置采样间隔,用于对点云模板和场景点云进行降采样(仅用于评估匹配结果)。该值越大,采样后的点云点数越少。当结果验证等级为自定义时,需设置该参数。 默认值:5.000 mm |
置信度阈值 |
参数解释:如果匹配结果的置信度大于此阈值,则认为该结果有效。置信度越高,匹配结果越准确。 默认值:0.3000 调节建议:建议先将该参数设置为默认值并查看运行结果。若出现误识别的情况,建议适当调高该参数;若出现漏识别的情况,建议适当调低该参数。 |
面匹配中考虑法向偏差 |
参数解释:在对面匹配结果进行验证时,考虑场景点云和点云模板对应点的法向的角度差异,勾选后,输出的匹配结果个数可能减少,但可提高匹配结果准确性。 默认值:不勾选 |
面匹配中考虑孔洞 |
参数解释:面匹配时,若点云模板和工件点云的外轮廓一致,而工件点云或面点云模板带有孔洞,容易造成误匹配(如圆环和圆盘之间的误匹配)。开启该项后,如果面点云模板和工件在孔洞部分不能匹配,相应的面匹配置信度降低。如果对面点云模板进行了编辑,编辑后的模板不能完全贴近真实物体的形状,例如删除了面点云中心部分复杂花纹,建议关闭该功能。 默认值:开启 |
置信度策略 |
参数解释:该参数用于选择设置联合评分策略的方式。 值列表:手动、自动
默认值:自动 |
联合评分策略 |
参数解释:该参数用于选择用于结果验证的评分策略。选择考虑面和边缘时,置信度设置下面匹配和边缘匹配的参数需要分别设置,用于对匹配结果进行更好的过滤。 值列表:考虑面和边缘、仅考虑面 默认值:仅考虑面 调节建议:当联合评分策略为考虑面和边缘时,推荐将面匹配置信度阈值设置高一些、边缘匹配置信度阈值设置低一些。当联合评分策略为仅考虑面时,步骤将仅使用面匹配分数进行匹配结果验证。 |
去除重叠物体位姿
| 参数 | 解释 |
|---|---|
启用去重叠功能 |
|
重叠比例阈值 |
参数解释:当两个物体点云正交投影后的掩膜重叠比例超过此值时,将去除位姿置信度低的物体位姿。当开启启用去重叠功能时,需设置该参数。 默认值:30% |
去除压叠物体位姿
| 参数 | 解释 | ||
|---|---|---|---|
启用去压叠功能 |
|||
压叠比例阈值 |
参数解释:该参数用于设置物体与其他物体压叠比例的阈值。当压叠比例超过此值时,该物体将被判断为压叠物体。当开启启用去压叠功能时,需设置该参数。
默认值:30% |
||
物体周围场景点移除范围 |
参数解释:此参数范围内,物体周围的场景点云将被移除,剩余的场景点云将参与压叠检测。当开启启用去压叠功能时,需设置该参数。 默认值:3.000 mm |
输出
| 参数 | 解释 | ||
|---|---|---|---|
最大输出结果个数 |
参数解释:该参数指定匹配成功的最大输出工件个数。该值越大,步骤运行时间越长。 默认值:10 调节建议:建议适当设置该参数,不宜将该值设置过高。若修改该参数,将在重新运行步骤后生效,并基于新的匹配结果限制输出结果个数。
|
可视化
| 参数 | 解释 |
|---|---|
可视化内容 |
参数解释:打开“调试输出”后,选中的选项将被生成并显示在调试输出窗口。 值列表:粗匹配、精匹配、调整 X 轴朝向、置信度、去除被压叠的位姿、输出结果 默认值:输出结果 调节说明:需开启调试输出功能,才可在调试输出窗口中显示位姿。 |
点云显示设置 |
参数解释:该参数用于选择可视化信息中显示的点云类型。当选择“自动”时,将自动设置显示类型。 值列表:自动、面、边缘 默认值:自动 调节说明:该参数决定可视化信息中的彩色点云使用边缘点云还是面点云。可分别选择不同的点云类型,观察物体和场景的贴合程度,进而辅助调整参数。 |
显示位姿 |
参数解释:开启后,将在调试输出窗口中显示位姿。 默认值:开启 |