双机器人相对位姿标定
本文介绍“位姿变换(高级)”步骤中的“双机器人相对位姿标定”功能及其使用流程。
功能介绍
该功能用于标定两台机器人之间的空间位姿关系,即计算一台机器人在另一台机器人坐标系下的位姿。支持以下两种硬件配置方式:
-
单机器人安装相机:一台机器人搭载相机,另一台携带标定板。通过相机对标定板进行标定,以计算两机器人之间的位姿关系。
-
双机器人安装相机:两台机器人各自携带相机拍摄同一固定标定板,通过相机外参计算两机器人之间的位姿关系。
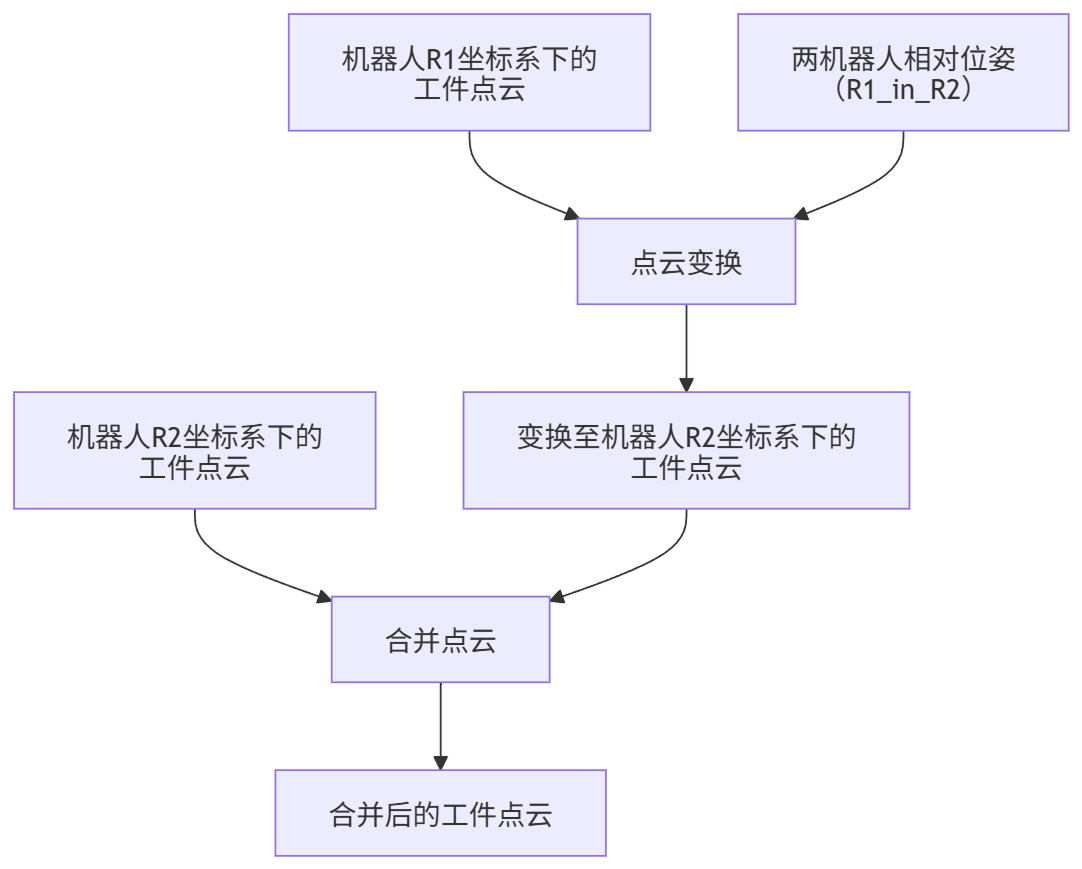
标定完成后,将通过输出端口输出两台机器人之间的相对位姿,可用于后续的坐标系变换和数据合并操作,便于双机器人协同作业。此外,已保存的位姿关系可直接加载复用,无需重复标定。
使用流程
本节介绍获取两台机器人相对位姿关系的三种方法,用户可根据实际需求选择合适的操作流程:
通过单机器人安装相机进行位姿标定
适用于两机器人尚未建立相对位姿关系,且仅在一台机器人上安装相机进行标定的场景。
选择创建类型
-
单击配置向导按钮,打开位姿变换工具,选择双机器人相对位姿标定。
-
在右侧参数区,选择创建类型为创建空白关系计算,相机安装方式选择为单机器人安装相机。
单击确定按钮进入两机器人相对位姿标定流程。
标定两机器人位姿关系
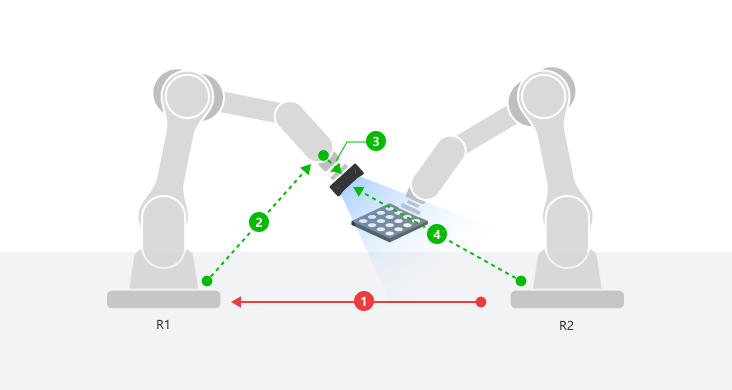
两机器人相对位姿标定的总体流程如下图所示。

默认以机器人R2为参考坐标系,在机器人R1上安装相机,通过计算输出机器人R1在R2坐标系下的位姿。操作步骤如下:
-
获取EIH外参:通过手眼标定获取机器人R1上相机的外参。(见图示3)
-
输入法兰位姿:固定装有相机的机器人R1,充当相机支架,用于进行ETH外参标定。手动输入机器人R1在标定ETH外参时的法兰位姿。(见图示2)
-
获取ETH外参:机器人R1保持不动,由机器人R2携带标定板运动,通过手眼标定获取相机与机器人R2之间的外参关系。(见图示4)
-
计算相对位姿:基于上述数据,计算机器人R1在R2坐标系下的相对位姿关系。(见图示1)
下文将对位姿标定流程进行介绍。
-
获取EIH外参。
提供三种获取EIH外参的方法,分别为选用工程外参、EIH标定外参和手动输入,具体说明如下表所示。
序号 获取方式 方法 1
选用工程外参
-
在已有外参标定结果的情况下,选择当前方案下的工程。
-
在所选工程下选择所需的标定参数组。
-
选定后将加载已有标定结果。
2
EIH标定外参
单击EIH标定外参后进入3D相机标定工具,并参考手眼标定操作指南获取EIH外参。
3
手动输入
单击手动输入后进入编辑位姿工具,可手动设置EIH外参。
-
-
输入机器人R1的法兰位姿。
在位姿编辑工具中输入机器人R1在获取ETH外参时记录的法兰位姿。
-
获取ETH外参。
提供三种获取ETH外参的方法,分别为选用工程外参、ETH标定外参和手动输入,具体说明如下表所示。
序号 获取方式 方法 1
选用工程外参
-
在已有外参标定结果的情况下,选择当前方案下的工程。
-
在所选工程下选择所需的标定参数组。
-
选定后将加载已有标定结果。
2
ETH标定外参
单击ETH标定外参后进入3D相机标定工具,并参考手眼标定操作指南获取ETH外参。
3
手动输入
单击手动输入后进入编辑位姿工具,可手动设置ETH外参。
-
-
计算相对位姿。
成功获取上述数据后,单击开始计算按钮,自动计算两台机器人的相对位姿关系,并通过输出端口输出计算结果。
-
设置相对位姿名称。
在基础设置中设置机器人相对位姿名称,用于在方案中调用。该名称不得与当前方案中已存在的相对位姿名称重复。
至此,已完成通过单机器人安装相机进行相对位姿标定的流程。单击应用按钮完成输出端口配置,并保存标定后的相对位姿文件。
通过双机器人安装相机进行位姿标定
适用于两机器人尚未建立相对位姿关系,且在两台机器人上均安装相机进行标定的场景。
选择创建类型
-
单击配置向导按钮,打开位姿变换工具,选择双机器人相对位姿标定。
-
在右侧参数区,选择创建类型为创建空白关系计算,相机安装方式选择为双机器人安装相机。
单击确定按钮进入两机器人相对位姿标定流程。
标定两机器人位姿关系
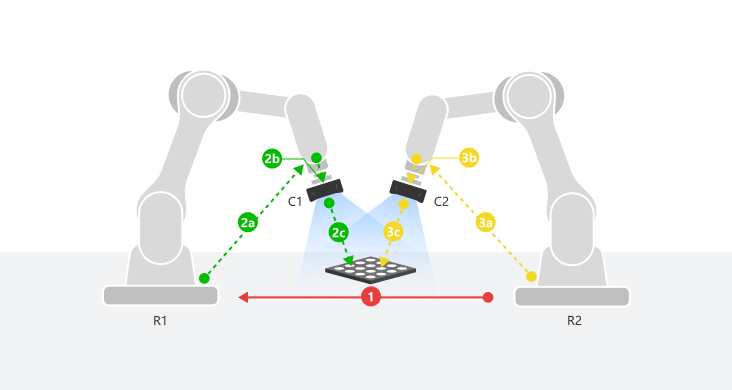
两机器人相对位姿标定的总体流程如下图所示。

默认以机器人R2为参考坐标系,机器人R1和R2分别安装相机C1和C2,通过计算输出机器人R1在R2坐标系下的位姿。操作步骤如下:
-
获取EIH外参:通过手眼标定分别获取机器人R1上相机C1的外参和机器人R2上相机C2的外参。(见图示2b、3b)
-
放置并采集标定板图像:将标定板置于两台机器人之间,确保R1和R2携带的相机均能拍摄到标定板。通过相机C1和C2分别采集并计算标定板的位姿。采集过程中需保持标定板静止,若标定板在采集期间发生移动,则需重新采集图像。(见图示2c、3c)
-
输入法兰位姿:图像采集完成后,分别记录并输入机器人R1和R2在采集标定板图像时的法兰位姿。(见图示2a、3a)
-
计算相对位姿:基于上述数据,计算机器人R1在R2坐标系下的相对位姿关系。(见图示1)
下文将对位姿标定流程进行介绍。
-
获取机器人R1和R2的EIH外参。
提供三种获取EIH外参的方法,分别为选用工程外参、EIH标定外参和手动输入,具体说明如下表所示。
序号 获取方式 方法 1
选用工程外参
-
在已有外参标定结果的情况下,选择当前方案下的工程。
-
在所选工程下选择所需的标定参数组。
-
选定后将加载已有标定结果。
2
EIH标定外参
单击EIH标定外参后进入3D相机标定工具,并参考手眼标定操作指南获取EIH外参。
3
手动输入
单击手动输入后进入编辑位姿工具,可手动设置EIH外参。
获取EIH外参后,需分别采集两台机器人拍摄的标定板位姿,并记录每台机器人在拍摄时的法兰位姿。
-
-
放置并采集标定板图像。
-
选择标定板。
在参数区设置标准标定板型号参数,然后单击下一步按钮。
-
检查标定板位置及图像质量。
-
将标定板放置到两机器人公共区域,确保两相机均能拍摄到标定板。
-
单击连接按钮连接相机,在相机编号列表中选中需要连接的相机,然后单击“连接”图标即可连接相机,或者直接双击需要连接的相机。
-
单击连续采集按钮,采集标定板图像。在2D视图中,请确保标定板完整出现在红框内。同时,检查标定板图像质量,需满足以下要求:
-
在2D图中,标定板整体亮度不宜过暗、过亮或亮度不均,每个标定圆应清晰可见。
-
在深度图中,标定板上的每个标定圆应完整。
若标定板成像质量差,请前往Mech-Eye Viewer 对“calib”参数组进行调节。若使用的是DEEP、LSR系列相机,请调节“2D图(深度源)”分组下的参数。
-
-
-
确认标定板位置及图像质量无误后,保持标定板位姿不动。单击采集并计算按钮,完成标定板位姿的采集与计算。
-
标定板位姿确定后,应保持不变,分别由机器人R1和R2进行两次图像采集。若标定板在采集过程中发生移动,则需返回流程中两处“采集标定板图像并计算位姿”步骤重新采集图像。
-
采集标定板图像时,请准确记录采集时机器人的法兰位姿,并在后续步骤中输入。输入的法兰位姿必须与图像采集时的实际位姿完全一致。
-
-
-
输入机器人R1和R2的法兰位姿。
采集并计算标定板位姿后,在位姿编辑工具中分别输入机器人R1和R2在采集标定板图像时记录的法兰位姿。
-
计算相对位姿。
成功获取上述数据后,单击开始计算按钮,自动计算两台机器人的相对位姿关系,并通过输出端口输出计算结果。
-
设置相对位姿名称。
在基础设置中设置机器人相对位姿名称,用于在方案中调用。该名称不得与当前方案中已存在的相对位姿名称重复。
至此,已完成通过双机器人安装相机进行相对位姿标定的流程。单击应用按钮完成输出端口配置,并保存标定后的相对位姿文件。