3D料筐识别
使用场景
该步骤适用于料筐位置发生变化的工件抓取场景。该步骤一般前接从相机获取图像步骤,后接位姿调整类步骤。
-
场景一
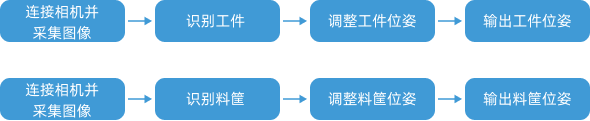
来料阶段料筐位置存在变化,但在工件抓取过程中料筐保持静止。此时仅需在每个料筐首次来料时进行一次识别,无需重复识别,从而有效提升节拍。
在该场景下,可在两个独立的视觉工程中分别进行工件识别、料筐识别,如下图所示。
-
场景二
工件抓取过程中料筐可能发生移动,或料筐点云会对工件识别造成干扰。此时需同时进行工件识别和料筐识别,实时更新料筐位姿,并在匹配阶段避免料筐点云对工件造成干扰,从而提升工件识别稳定性。
在该场景下,可在一个视觉工程中同时进行料筐识别、工件识别,如下图所示。

输入与输出
输出
| 输出端口 | 数据类型 | 说明 |
|---|---|---|
料筐位姿 |
Pose[] |
料筐位姿。 |
料筐名称 |
String[] |
料筐名称。 |
料筐尺寸 |
Size3D[] |
料筐尺寸。 |
料筐内部深度图 |
Image[] |
料筐内部的深度图。 在3D料筐识别工具的“通用设置”流程中勾选“深度图和彩色图”后,步骤将增加该端口。 |
料筐内部彩色图 |
Image[] |
料筐内部的彩色图。 在3D料筐识别工具的“通用设置”流程中勾选“深度图和彩色图”后,步骤将增加该端口。 |
料筐内部面点云 |
PointCloud/XYZNormal[] |
料筐内部的面点云。 在3D料筐识别工具的“通用设置”流程中勾选“面点云和边缘点云”后,步骤将增加该端口。 |
料筐内部边缘点云 |
PointCloud/XYZNormal[] |
料筐内部的边缘点云。 在3D料筐识别工具的“通用设置”流程中勾选“面点云和边缘点云”后,步骤将增加该端口。 |