调整轨迹
合并轨迹
当机器人需要在多条轨迹上连续运动,无需离开工件表面、无需切换末端工具时,可通过合并轨迹的方法合并多条轨迹。
合并轨迹功能可将多条首尾相接的轨迹合并为一条连续轨迹,使机器人在作业过程中无需离开工件表面即可连续运动。
-
创建轨迹。
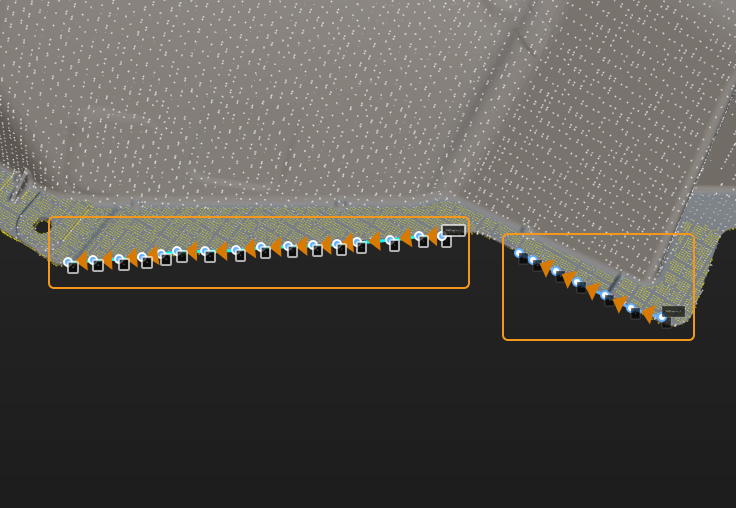
确保工件上存在至少两条轨迹,如下图所示。
-
合并轨迹
在“轨迹线列表”中选中任一轨迹,单击合并轨迹按钮,然后选择想要合并的轨迹,最后单击应用按钮,即可合并两条轨迹。
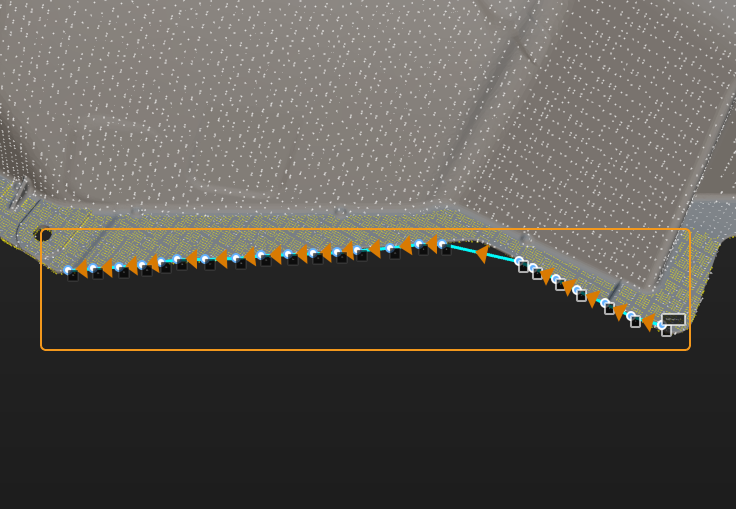
合并轨迹时,各条轨迹将首尾相连,合并为一条轨迹,如下图所示。
切分轨迹线
切分轨迹线的操作方法如下。
-
在轨迹线列表中选中某轨迹点。
-
单击轨迹点右侧的
 按钮,然后在快捷菜单中选择切分轨迹线,即可在所选轨迹点处开始切分轨迹线,该轨迹点及后面其他轨迹点将被切分为一条新的轨迹线。
按钮,然后在快捷菜单中选择切分轨迹线,即可在所选轨迹点处开始切分轨迹线,该轨迹点及后面其他轨迹点将被切分为一条新的轨迹线。
将某轨迹点设为起点并重排序
将某轨迹点设为起点并重排序的操作方法如下。
-
在轨迹线列表中选中某轨迹点。
-
单击轨迹点右侧的
按钮,然后在快捷菜单中选择设为起点并重新排序,即可将所选轨迹点设为轨迹线起点,该轨迹点之前的其他点将排布于轨迹线末尾。
反转轨迹点顺序
翻转轨迹点顺序的操作方法如下。
-
在轨迹线列表中选中某轨迹线。
-
单击轨迹点右侧的
 按钮,即可反转所选轨迹线中的轨迹点顺序。
按钮,即可反转所选轨迹线中的轨迹点顺序。例如,将轨迹点顺序由 1→2→3→4→5 变为 5→4→3→2→1。