使用流程
本文将介绍抓取仿真工具的部署前提和具体配置流程,具体如下图所示。

下面将对各环节进行详细说明。
部署前提
在使用抓取仿真工具前,需先在 Mech-Viz 中搭建一个基础的工作流程,确保仿真过程顺利进行。

在开始仿真验证前,请务必检查当前工作流程是否符合抓取仿真支持的规范要求。若流程不符合要求,系统将提示报错。主要检查项包括:
-
出口限制:设置DO和消息分支步骤仅支持固定出口,且需设置有效出口。
-
禁止步骤:工作流程中不可包含以下不支持的步骤:
-
分类
-
更新场景物体
-
更新已持有工件
-
更新托盘位姿
-
检查工具
-
计数器
-
完成检查
-
-
结构限制:工作流程中不可包含循环结构。
-
长度限制:工作流程中的步骤数量不可超过 10,000。
-
视觉步骤限制:
-
工作流程内有且仅有一个视觉移动步骤,且该步骤不支持复用视觉结果、不支持共享视觉结果。
-
工作流程内的首个移动类步骤必须为“定点移动”,且其目标类型需设置为“关节角模式”。该步骤设置的关节角即为每次仿真验证时机器人的初始关节角。
-
| 每次开始抓取仿真前,请确保工具栏中的保持上一次执行状态为关闭状态,避免多轮仿真导致视觉移动等步骤的历史状态异常,确保仿真流程的准确性。 |
布局模拟
在进行抓取仿真前,需要先搭建包含载具和工件的虚拟场景。通过合理设置工件的摆放方式和数量,使仿真环境尽可能贴近实际工况,为后续抓取策略验证提供基础。
选择载具
首先指定仿真场景中需要使用的载具模型。支持从现有方案中选择已有载具,或新增载具并配置参数。
-
若已有载具满足需求,可直接选用。
-
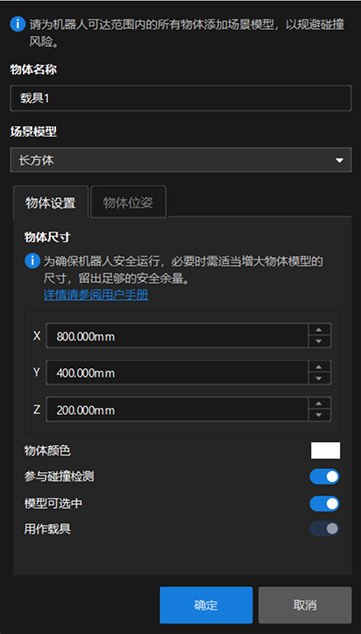
若需使用新的载具,可单击新建载具,进入载具配置界面,设置载具名称、场景模型、载具尺寸等参数。其中,场景模型即为载具类型设置,支持料筐、长方体和圆柱体。当选择长方体或圆柱体类型时,用作载具参数默认勾选且不可关闭。
-
如需调整已有载具配置,单击编辑按钮进行修改。
新增或编辑载具的具体配置流程请参考场景物体配置。
| 若通过配置载具,此时用作载具默认未勾选,请手动勾选。 |
设置工件
载具确定后,需要选择参与仿真的工件并配置其显示颜色。 选择工件时:
-
若方案中已有工件满足需求,可直接选用。
-
若需使用新的工件,可单击新建工件,跳转至工件库界面创建工件,支持通过 STL 文件或简易几何体创建工件模板。
-
如需调整已有工件配置,单击编辑按钮进入工件库修改。
工件模板配置完成后,单击工件颜色旁的色块,设置工件在仿真中的显示颜色。
设置摆放方式
根据实际生产需求,选择工件的摆放方式,包括无序摆放和有序摆放。
无序摆放
工件散乱掉落于载具内,模拟实际生产中的无序堆叠情况。具体参数说明及配置请参见下表。
参数 |
说明 |
摆放姿态 |
该参数用于设置工件朝向。其中,工件坐标系默认与载具坐标系一致,即工件 X/Y/Z 轴朝向与载具 X/Y/Z 轴朝向一致。
|
掉落区域 |
该参数用于限定工件在区域内的随机落点范围。若工件掉落至区域外,将自动移除并重新掉落,直至落点位于指定区域内。
|
工件数量 |
该参数用于设置参与仿真的工件总数。请根据实际需求设置合理的仿真工件数量。数量越多,仿真复杂度越高,运行速度相应降低。 |
有序摆放
工件按照固定位置和顺序摆放,模拟规则排列的情况。具体参数说明及配置请参见下表。
参数 |
说明 |
||
摆放姿态 |
该参数用于设置工件朝向。请参考无序摆放下的姿态设置方法,选择合适的视角和旋转角度,保证工件姿态符合实际场景。 |
||
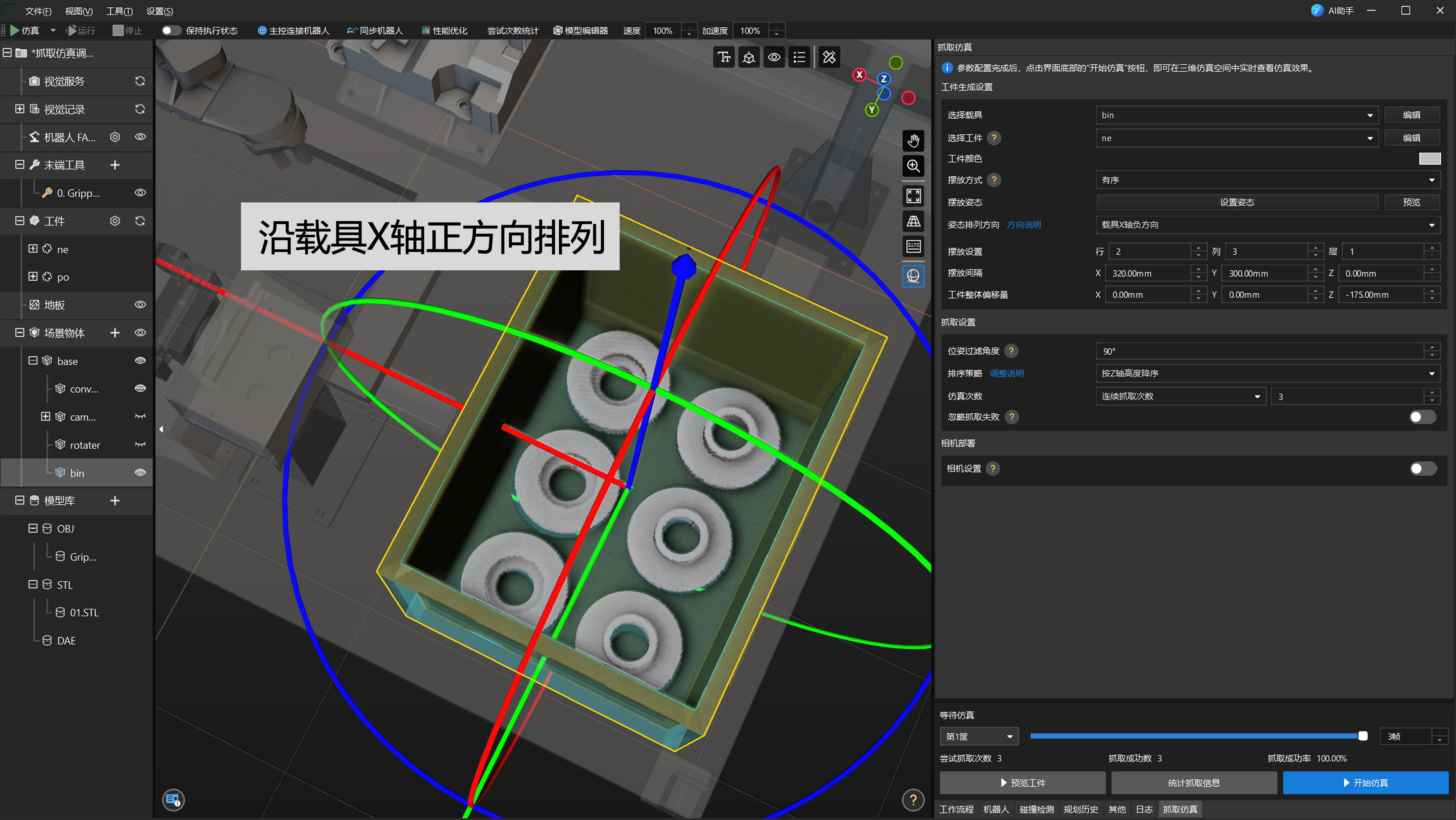
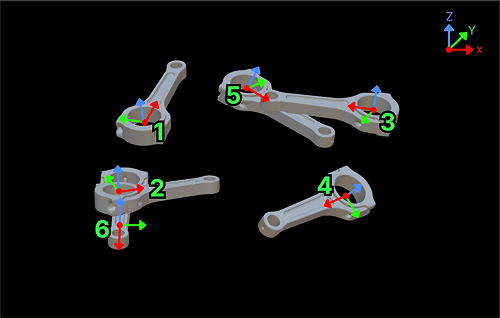
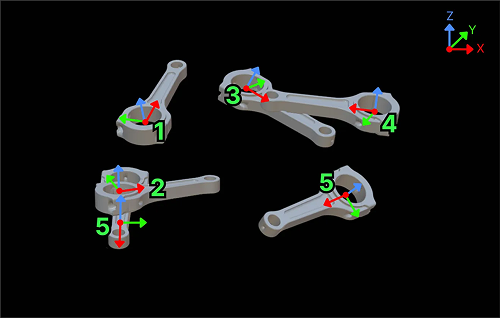
姿态排列方向 |
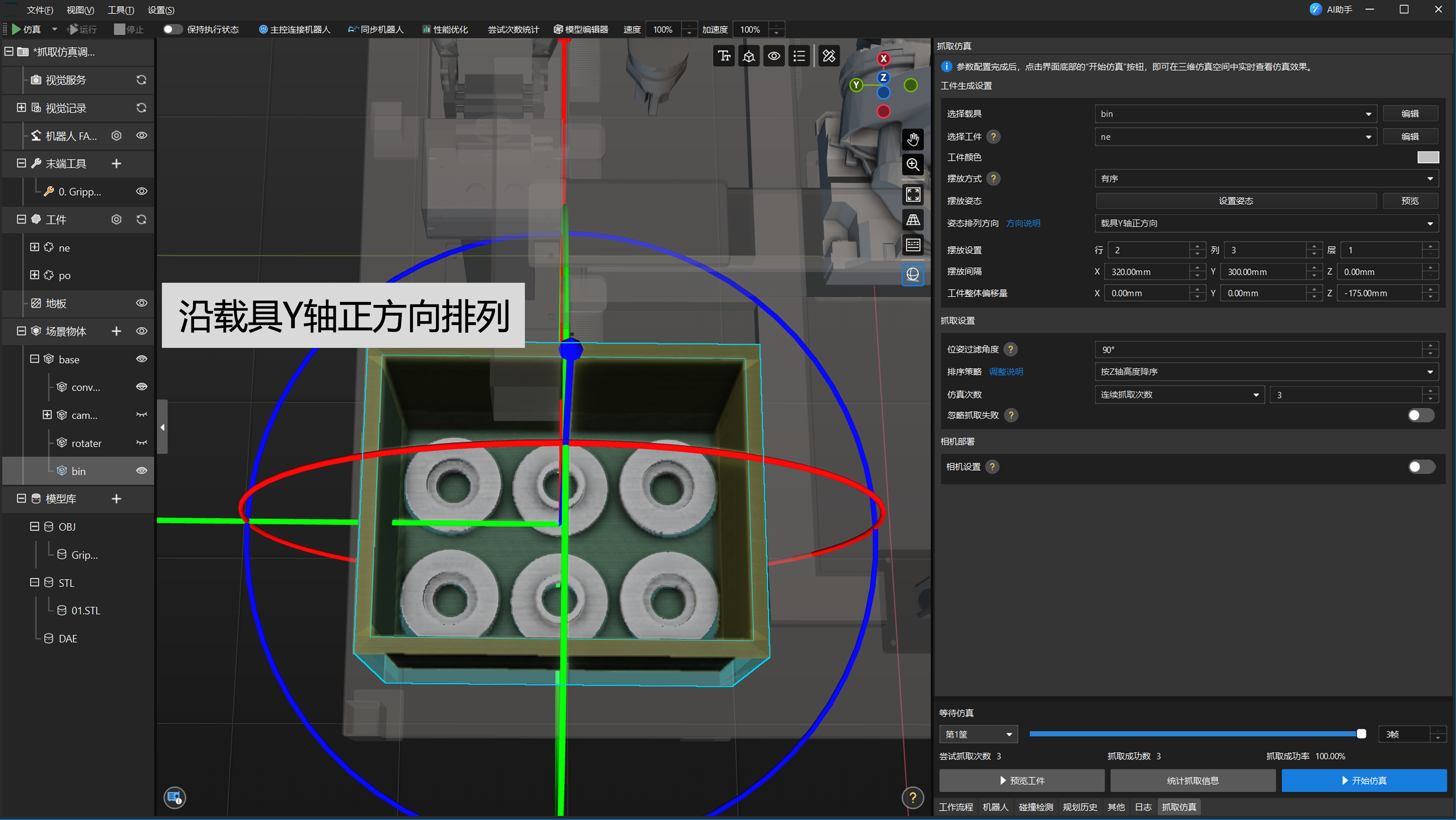
该参数用于指定工件在载具内摆放时的相对排列顺序,包括按载具 X 轴正方向、载具 X 轴负方向、载具 Y 轴正方向、载具 Y 轴负方向排列。 系统会按照所选方向,在该方向上依次循环排列已选姿态。例如,选择“载具 X 轴方向”时,将会沿载具 X 轴逐行排列不同姿态的工件;选择“载具 Y 轴方向”时,将会沿载具 Y 轴逐列排列不同姿态的工件。具体效果如下图所示: 
|
||
摆放设置 |
该参数用于设置工件行数、列数和层数,确定整体排列结构。 |
||
摆放间隔 |
该参数用于设置相邻工件之间的间距,可分别对 X、Y、Z 三个方向进行设置。间隔过小可能导致抓取时发生碰撞,建议预留安全距离。 |
||
工件整体偏移量 |
该参数用于调整整体工件排列在空间中的位置,可基于载具中心点在 X、Y、Z 方向上设置偏移值,实现工件整体平移。 |
在设置上述参数时,建议结合实际生产和抓取需求,并通过三维仿真空间的可视化显示进行工件摆放效果调试。
下面将通过一个示例,展示有序摆放方式下的工件摆放设置操作和效果,假设摆放姿态为两种(Z 轴正负方向):
-
当为载具 X 轴正方向时:
-
当为载具 Y 轴正方向时:
-
操作演示:
抓取设置
完成工件场景搭建后,需要配置抓取策略,以更真实地反映实际抓取逻辑,并评估抓取稳定性及失败情况对整体抓取效果的影响。
过滤位姿
通过设置位姿过滤角度阈值,可过滤倾斜角度过大的抓取点。当抓取点 Z 轴与世界坐标系 Z 轴的夹角大于该角度时,该抓取点将被过滤,且不参与后续路径规划。
| 若仿真过程中出现大量抓取失败,可前往工件库调整工件的抓取点设置,以使更多抓取点参与规划。 |
设置排序策略
排序方向用于决定抓取的优先顺序,可根据实际需求选择不同的排序策略。目前提供多种策略选择,包括按 Z 轴高度降序、按重叠率升序、按与 Z 轴夹角升序等,具体说明如下。
排序策略 |
图示 |
使用说明 |
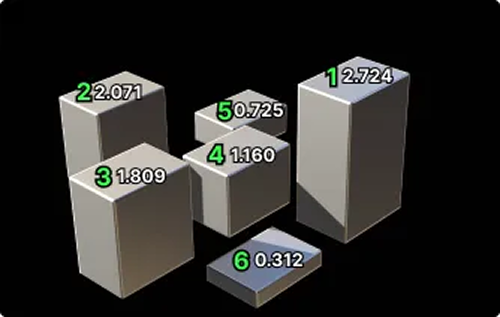
按 Z 轴高度降序 |
|
按照各工件抓取点 Z 值从高到低排序。 |
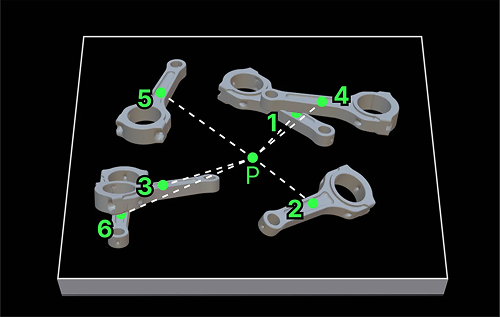
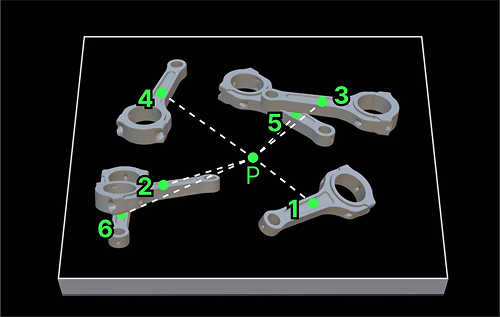
按到载具中心距离升序 |
|
按照抓取点到载具中心的距离从近到远排序,优先尝试距载具中心较近的抓取点。 |
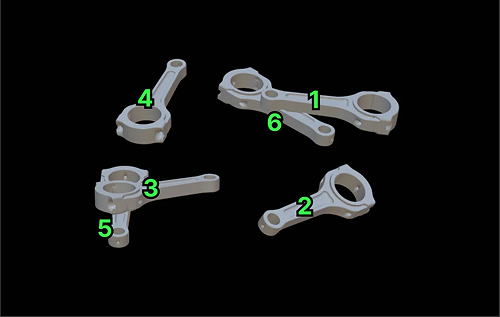
按重叠率升序 |
|
按照每个工件与其他工件的重叠率从低到高排序。 |
按重叠率升序 > 按与 Z 轴夹角升序 |
|
先按照工件的重叠率从低到高排序,重叠率相同或接近时,再按与 Z 轴夹角从小到大排序。 |
按重叠率升序 > 按到载具中心距离升序 |
|
先按照工件的重叠率从低到高排序,重叠率相同或接近时,再按距载具中心的距离从近到远排序。 |
按与 Z 轴夹角升序 |
|
按照抓取点 Z 轴与世界坐标系 Z 轴的夹角从小到大排序。 |
设置仿真次数
仿真次数用于控制抓取的重复执行次数,支持连续抓取次数和连续抓取筐数两种模式。
-
连续抓取次数:在同一筐内连续执行抓取,直至达到设定次数或筐内无可抓取工件。每次抓取后,系统会记录抓取结果。适用于单筐场景下抓取策略的验证。
-
连续抓取筐数:在多个筐之间连续执行抓取,每完成一筐抓取后自动生成下一筐抓取,直至达到设定筐数。适用于批量作业下抓取策略的稳定性评估。
是否忽略抓取失败
用于指定抓取失败后的处理方式。
-
若开启,当工件抓取规划失败,删除 Z 向高度最高的工件,继续尝试抓取其余工件,直至筐内无工件。适用于验证理想条件下的工件抓取成功率,忽略干扰工件的影响。
-
若关闭,当工件抓取规划失败,立即停止后续所有抓取仿真。适用于验证真实场景中的清筐率,更贴近实际效果。
| 忽略抓取失败可与仿真次数配合使用,且会影响仿真抓取流程。 |
-
若开启忽略抓取失败:
-
在连续抓取次数模式下,仅在单筐内执行指定次数,完成后仿真结束。
-
在连续抓取筐数模式下,每完成一个筐后自动生成下一个筐,继续抓取,直到达到设定筐数。
-
-
若关闭忽略抓取失败,无论选择何种仿真模式,一旦抓取规划失败,立即终止仿真。
相机部署(可选)
如需在抓取仿真中进行相机碰撞检测或验证相机视野覆盖范围,或需要保存仿真过程中相机采集的图片数据以便后续在视觉识别流程中使用,请开启相机部署并进行相关配置。该步骤为可选项,若无上述需求可跳过,不影响抓取仿真流程。
| 当前仅支持部署 Eye to hand 安装方式的相机。 |
选择相机类型
首先,开启相机设置。单击选择相机,在下拉框中可以选择已有相机或新建相机。
-
若现有相机满足需求,可直接选用。
-
若需使用新的相机,则单击新建相机,进入相机配置窗口。
-
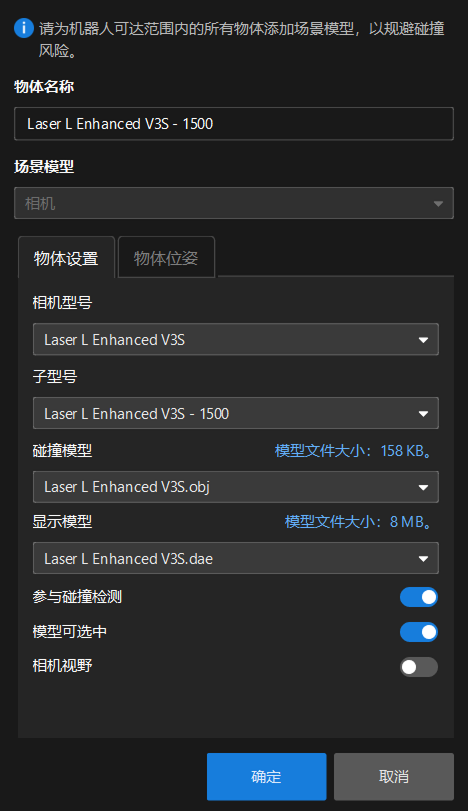
在物体名称文本框输入自定义的相机名称。
-
场景模型默认为相机,且不可更改。
-
在物体设置界面中,根据实际情况选择相机型号、子型号(如有)、碰撞模型和显示模型。
-
建议首次配置时开启相机视野,便于后续调整相机模型位姿。
-
新添加的相机模型默认位置在机器人基座标系原点,单击物体位姿切换配置界面,可以修改各项参数来调整相机模型的位姿。
-
-
若需要修改现有相机设置,单击编辑按钮进行修改。
| 在下右键相机名称,选择显示/隐藏相机视野。该参数与配置窗口的相机视野开关联动,即二者的相机视野显隐控制状态相同。 |
仿真验证
所有配置完成后,即可进入仿真验证阶段。系统将模拟机器人抓取流程,实时统计抓取结果与关键数据,便于全面评估抓取方案的可行性与风险点。
开始仿真
完成上述配置后,可进入抓取仿真验证阶段。单击开始仿真,系统将根据当前配置执行抓取,并实时更新尝试抓取数量和抓取成功数。
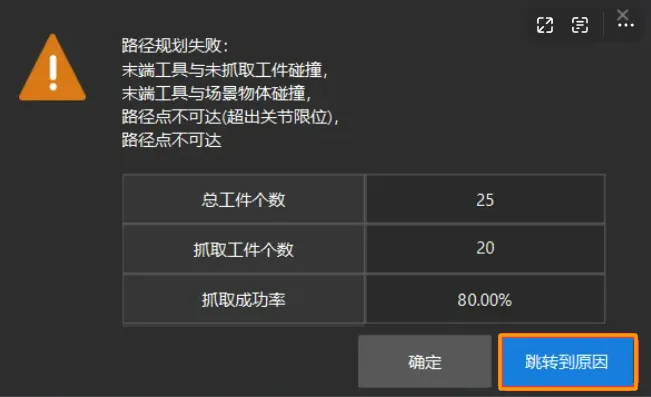
仿真自动完成后,会根据是否全部抓取出现以下任一提示:
如需查看抓取动态,可通过切换筐数、滑动条和帧数调节功能,灵活查看不同筐的抓取效果,逐帧播放整个抓取流程。

统计抓取信息
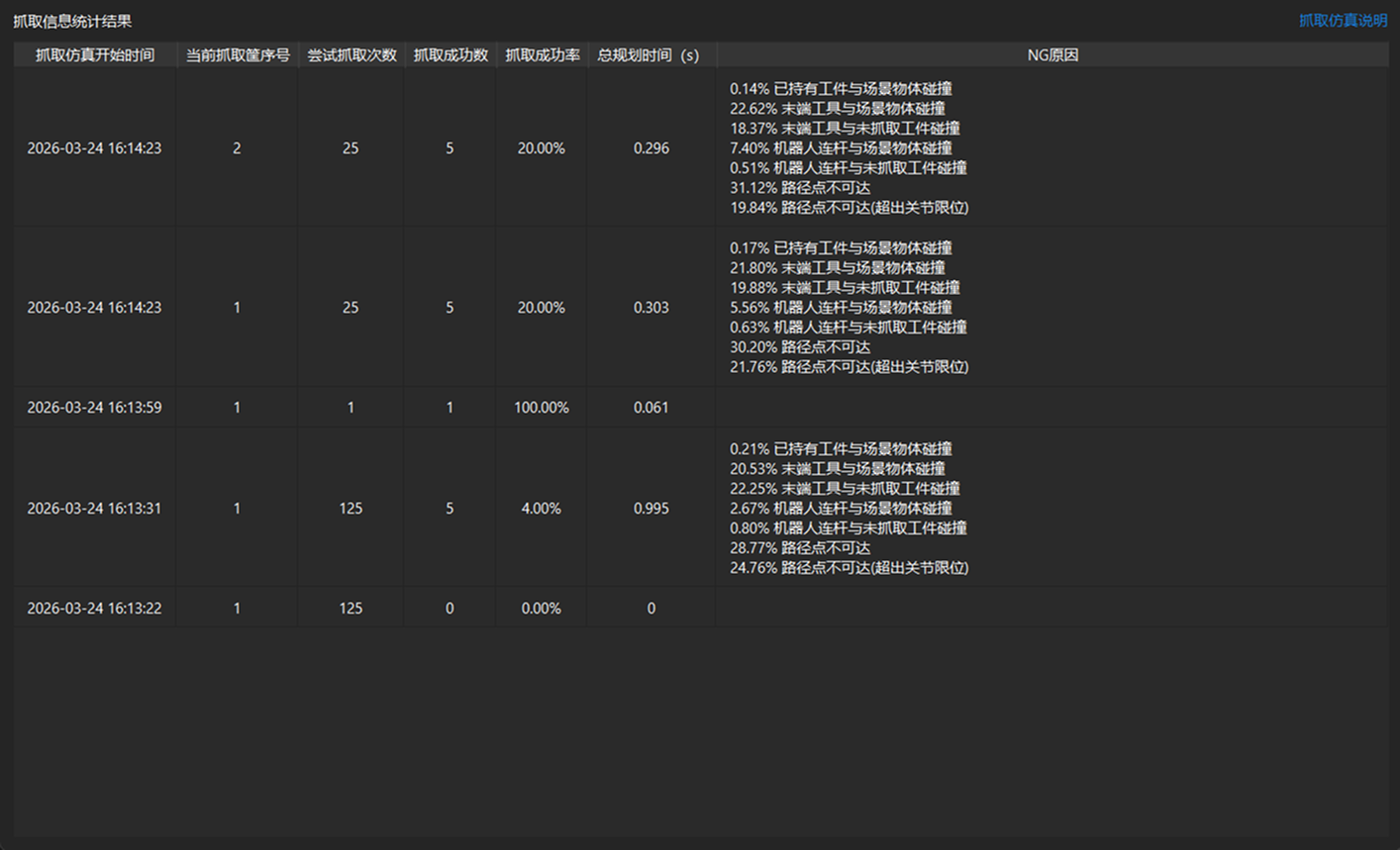
统计抓取信息用于查看历次仿真的详细结果与失败原因,支持对抓取性能进行量化分析。
单击统计抓取信息按钮,弹出统计结果窗口。其中,NG原因可作为优化抓取策略的依据,建议重点关注频繁出现的失败类型。
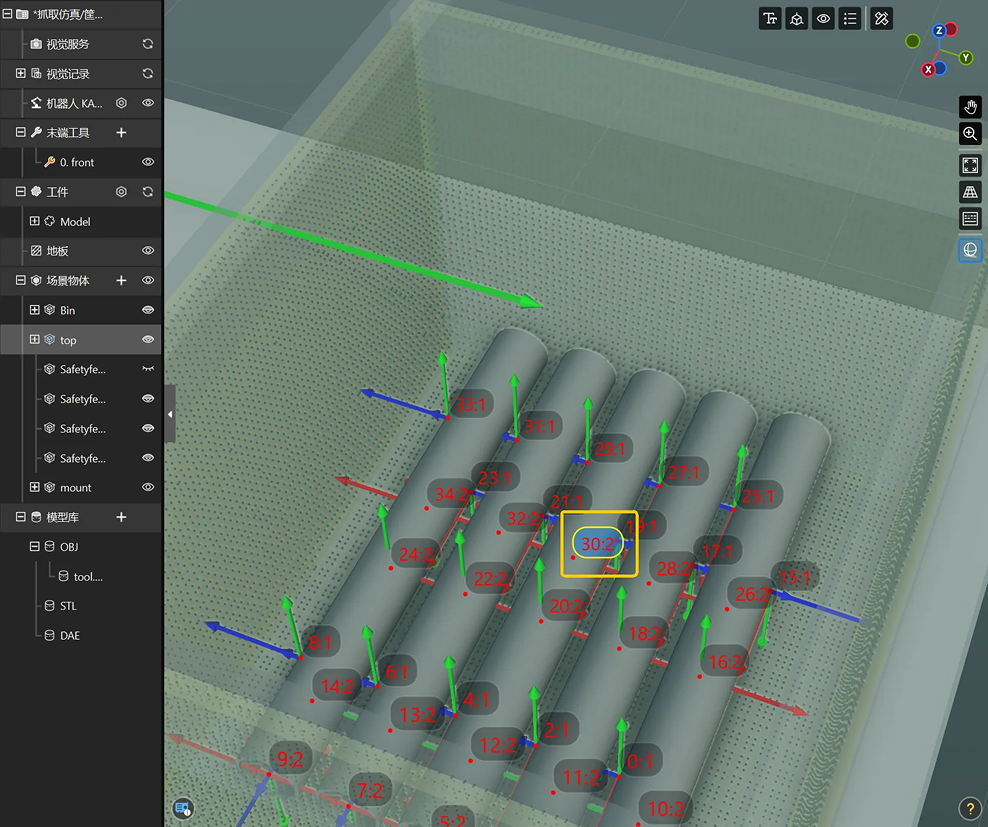
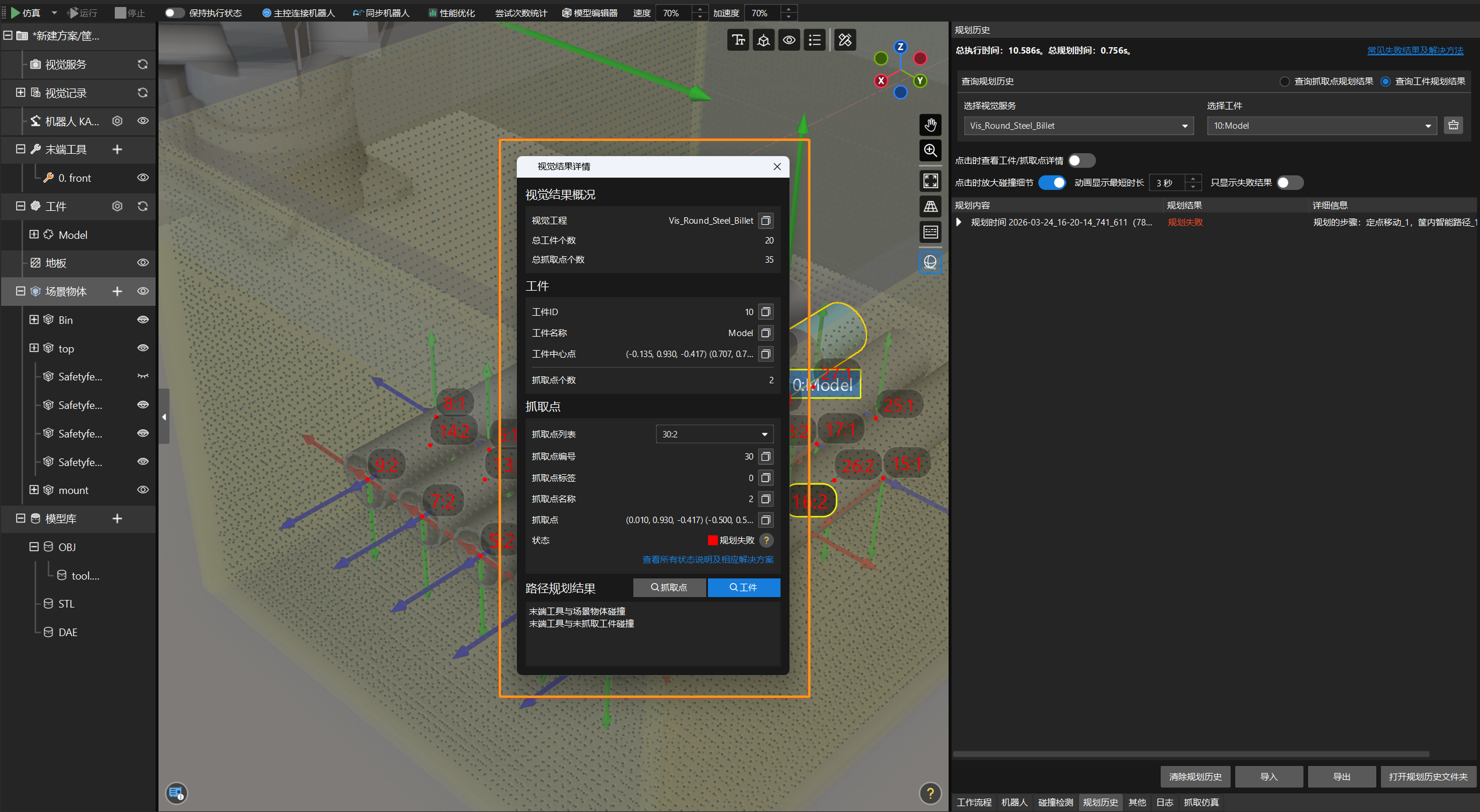
如需进一步定位具体规划失败的节点或工件,可通过“规划历史”功能或查看日志进行详细分析。
| 只有规划失败的工件才会进入规划历史,规划成功的工件不会记录在此。 可根据抓取失败弹窗指引跳转至规划历史,查看对应的规划内容和结果。 |
此外,通过双击工件上的抓取点信息,可查看视觉点详情。在“视觉结果详情”窗口中,单击路径规划结果中的抓取点和工件可了解规划状态,并跳转至规划历史进行问题排查。