抓取仿真工具
本文介绍抓取仿真工具及其使用方法。
功能介绍
抓取仿真工具是 Mech-Viz 内置的仿真工具,用于在虚拟环境中验证机器人抓取方案,主要包含虚拟场景生成和抓取验证两大功能。
该工具支持搭建包含载具、工件和相机的仿真场景,模拟完整的工件识别与抓取流程,以验证机器人抓取工件的可达性、夹持稳定性、清筐率以及防碰撞效果等,提前发现潜在的碰撞、漏抓等风险,辅助抓取方案在进场调试前完成风险排查与策略优化。
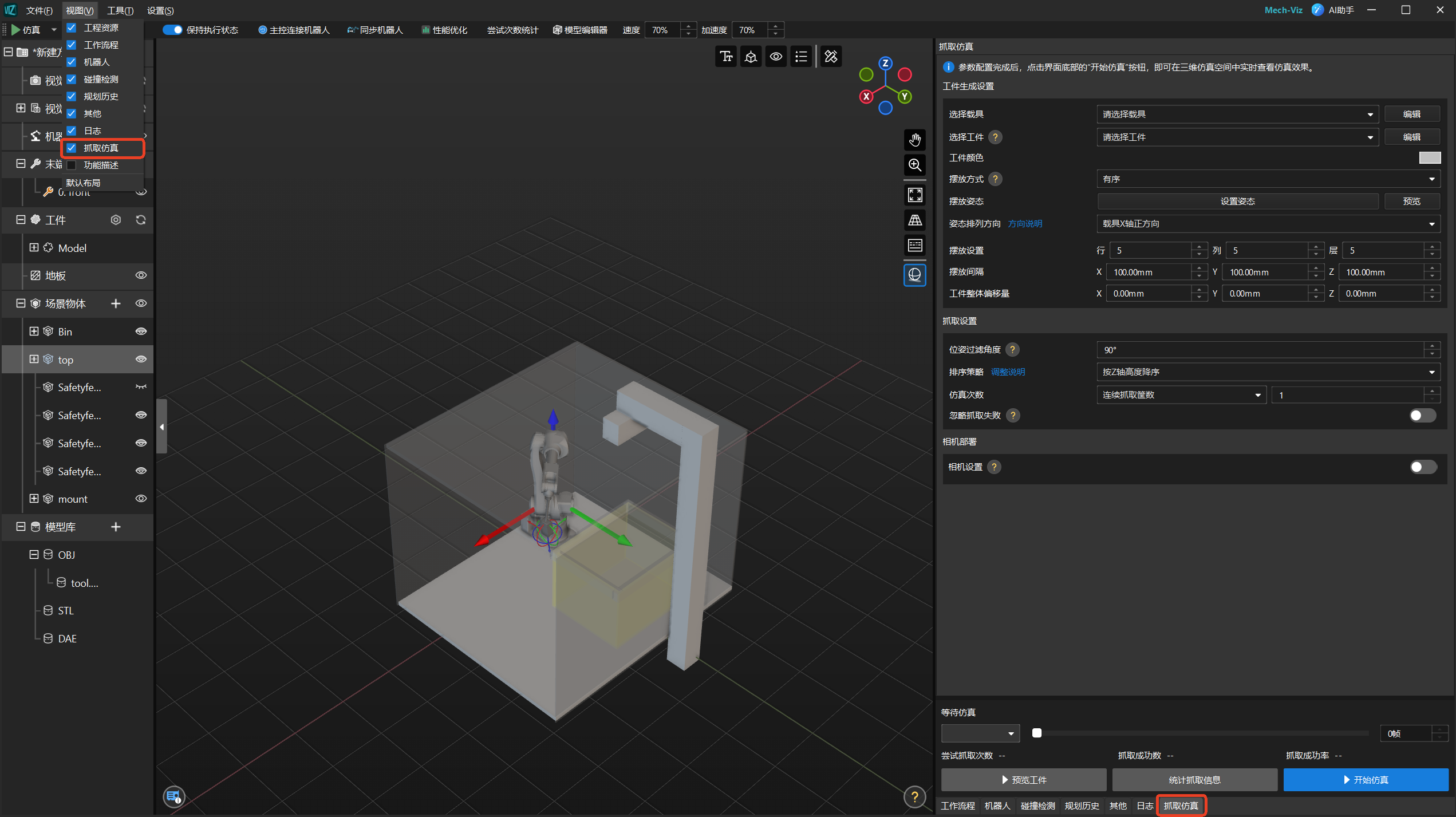
| 打开 Mech-Viz 后,功能面板通常默认显示为抓取仿真界面,可直接开始配置。若未显示该界面,请点击顶部菜单栏中的视图,勾选抓取仿真。 |