2D方法估计点云边缘
使用场景
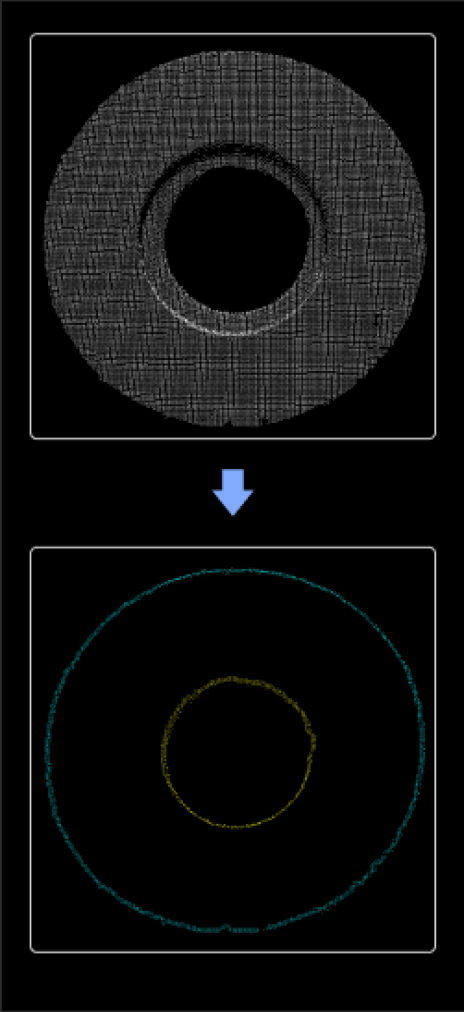
该步骤常用于平面工件的上料场景,用于提取平面工件的点云边缘,通常与3D匹配相关步骤联合使用。 相比3D边缘提取算法,该步骤的运算速度更快,推荐在运行时间短、3D点云干扰多,并且只需要提取工件的最外层边缘点的场景中使用。
参数说明
轮廓设置
| 参数 | 解释 |
|---|---|
2D线宽 |
参数解释:该参数用于设置在掩膜上提取轮廓时的线宽。该值越大,生成的2D轮廓越粗,映射为3D点云边缘后包含的点数越多。 默认值:3 px 调节说明:若边缘较细,可适当减小该值;若边缘不连续或有断裂,可适当增大该值。 |
轮廓检索方法 |
参数解释:该参数用于指定轮廓的检索方式,决定用于边缘提取的轮廓范围及其层级关系,从而影响生成的边缘点云的完整性及其轮廓结构。 值列表: CV_RETR_EXTERNAL、CV_RETR_LIST、CV_RETR_CCOMP、CV_RETR_TREE
默认值:CV_RETR_EXTERNAL |
最小长度 |
参数解释:该参数用于设置在掩膜中被认为是有效轮廓的最小像素点数。只有点数大于此值的轮廓才会被保留。 默认值:20 px 调节说明:若场景中有很多小噪声点,可适当增大该值;若需要保留较小的边缘细节,可减小该值。 |
合并同一点云内的轮廓 |
参数解释:该参数用于设置是否将属于同一个点云的多个轮廓合并为一个轮廓。合并后可简化边缘结构;不合并则保留所有独立轮廓。 默认值:不勾选 |
自定义轮廓层级 |
参数解释:该参数用于指定要提取的轮廓层级。当“轮廓检索方法”选择为“CV_RETR_TREE”时,需要设置该参数。层次结构从外层到内层增加。最外层层次为 1。此外,0 表示所有层级的轮廓,-1 表示最内层。 默认值:0 |