デパレタイズ用吸盤(複数把持)
「実行モード」に「デパレタイズ用吸盤(複数把持)」を選択した場合に以下のパラメータを調整できます。
箱の組合せ-組み合わせ方式
デパレタイズ用吸盤(複数把持)モードでは、一回に複数の箱をデパレタイズするために、計画を行う前に、ソフトウェアは複数の箱を組み合わせて全体として処理します。
ソフトウェアでは 3つの組合せ戦略が選択可能:「デフォルト」(初期設定)、「箱の座標系の軸に沿う」、「カスタマイズ座標系の軸に沿う」。
箱の座標系の軸に沿う
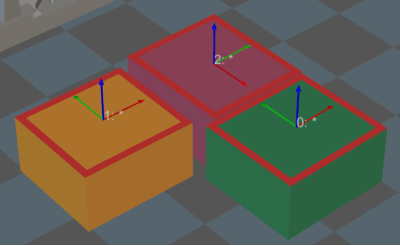
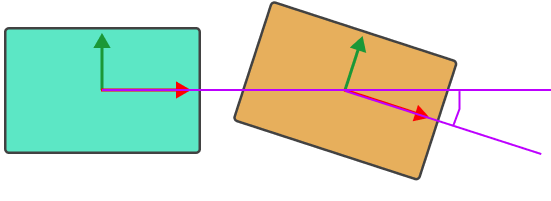
ある箱を組み合わせの出発点とし、この箱の座標系の軸の指向方向を組み合わせ方向として他の箱と組み合わせます。
組合せの制限
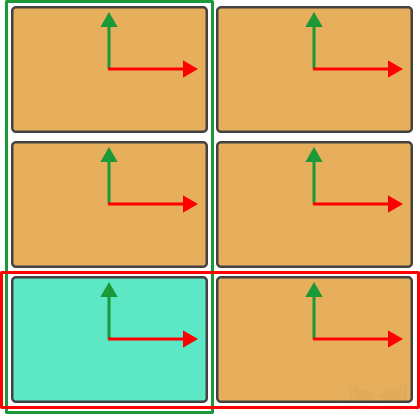
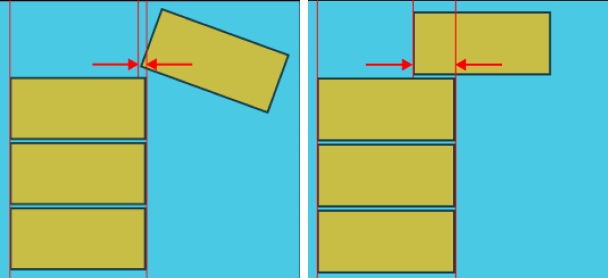
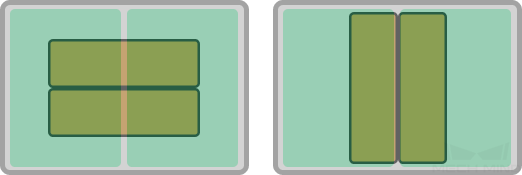
実際の状況に応じて組み合わせ方向を指定します。以下のような箱を把持する現場を例とします。左下(水色)の箱を出発点として X 軸(下図の赤い矢印)を指定する場合、赤枠に囲まれている 2つ箱を組み合わせます。Y 軸(下図の緑矢印)を指定する場合、緑枠に囲まれている 2つ箱を組み合わせる可能性があります。
吸盤オフセット‐オフセット方法
吸盤により箱をデパレタイズする現場では、使用する吸盤の構造は変更できず交換もできませんが、寸法が異なる箱を処理します。 対象外の箱を吸着することを回避するために、吸盤のオフセットが必要となります。
吸盤のオフセットは 3つの方法があります:「デフォルト」、「カスタマイズ戦略優先度」、「エッジ/コーナーのシーケンスによって」。
カスタマイズ戦略優先度
ユーザーが指定した優先度に従って把持します。
戦略の優先度
中心合わせ、辺の中心合わせ、コーナー合わせという 3つの戦略を選択できます。
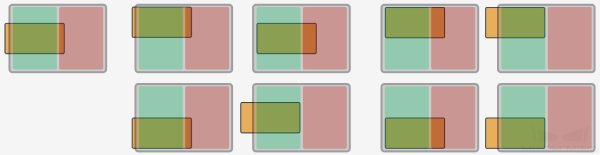
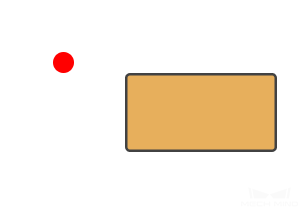
下図では、黄色い長方形は箱を、灰色の長方形は吸盤を表します。灰色の長方形の緑の部分はオンにしたブロックで、赤い部分はオフにしたブロックです。

-
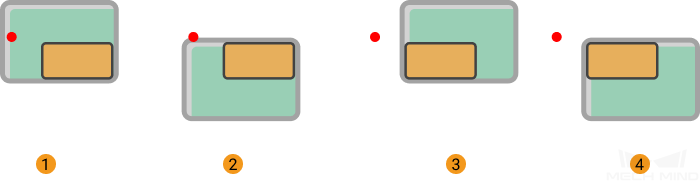
1つのブロックをオンにした場合
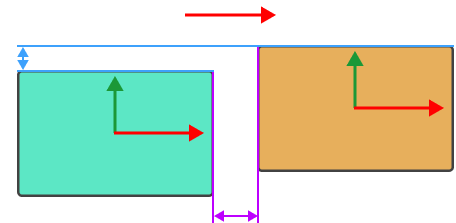
以下では、左のイメージ図は中心合わせ把持で、中のイメージ図は辺の中心合わせ把持で、右はコーナー合わせ把持です。
-
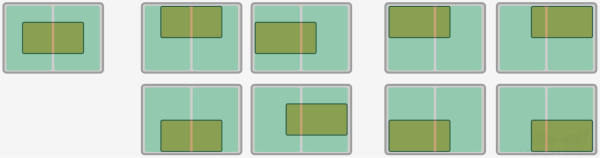
2つのブロックともオンにした場合
以下では、左のイメージ図は中心合わせ把持で、中のイメージ図は辺の中心合わせ把持で、右はコーナー合わせ把持です。
-
より多くのブロックをオンにした場合はこれによって類推します。
エッジ/コーナーのシーケンスによって
ユーザーが指定したエッジ/コーナーのシーケンスに従って箱を把持します。
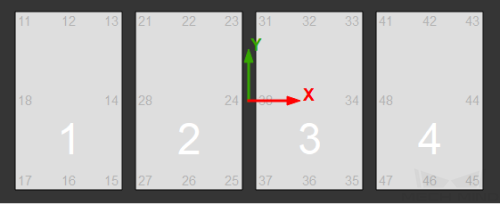
エッジ/コーナーのシーケンスは吸盤コンフィギュレータで自動的に生成されます。下図に示すように、吸盤の各ブロックのエッジ/コーナーにある番号はエッジ/コーナーのシーケンスです。