キャリブレーション原理
本節では、様々なシーンに適したキャリブレーションの動作原理について説明します。
標準キャリブレーション法(ETH)

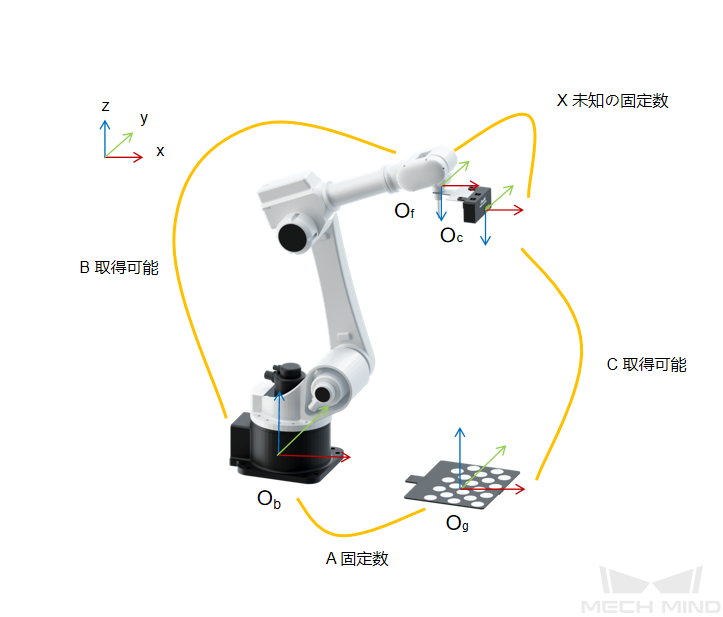
フランジを介して寸法が確認されたキャリブレーションボードをロボット先端に取り付けて、キャリブレーションボードの各白い円がロボットベース座標に対する座標Aを取得します。カメラでキャリブレーションボードの各白い円の画像を撮影して、カメラ光学中心がキャリブレーションボードの各白い円に対する座標Bを取得します。カメラ光学中心とロボットベース座標との位置姿勢関係Xをとします。A、B、Xは方程式になり、Xが求められます。キャリブレーションボードとフランジ位置との位置関係Cは未知で、キャリブレーションボードを移動させて異なる数値を取得してCを求め、さらにAが求められます。ロボットを移動させてキャリブレーションボードがカメラに対する位置姿勢を何回も変更して複数の方程式を得ます。これらの方程式の値をフィッティング計算して最適なX値を得ます。位置姿勢の関係は下図に示します。

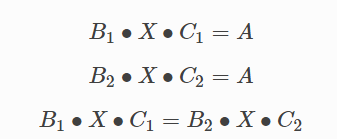
カメラ座標系とロボット座標系の対応関係を表す式は以下の通りです。
標準キャリブレーション法(EIH)

カメラスタンドを使用してカメラをロボット先端に固定します。この場合、ロボット先端のフランジ中心はカメラ光学中心との位置姿勢関係は固定されます。それは、下図の未知変数Xです。ロボットのベース座標系に対する先端のフランジ中心の位置姿勢は、既知変数Bとします。カメラはキャリブレーションボードの画像を撮影し、カメラの光学中心とキャリブレーションボード上の各白い円との位置姿勢の関係を取得し、既知変数Cを取得します。キャリブレーションボードは、カメラの視野内に平らに置かれて、ロボットのベース座標に対する相対位置姿勢は、固定値Aとします。このように、変数A、B、C、Xは方程式になります。以下の方程式には、 Aが定数値なので、最初の2つの方程式から得た新しい方程式では、Xだけが未知数です。ロボット先端の位置姿勢を変更して、さまざまな角度から画像を撮影することにより、複数セットのA、B、Cの値を取得します。それらを使用してフィッティング計算してXの最適値を取得します。
カメラ座標系とロボットフランジ座標系の対応関係を表す式は以下の通りです。
TCPタッチ法(ETH)

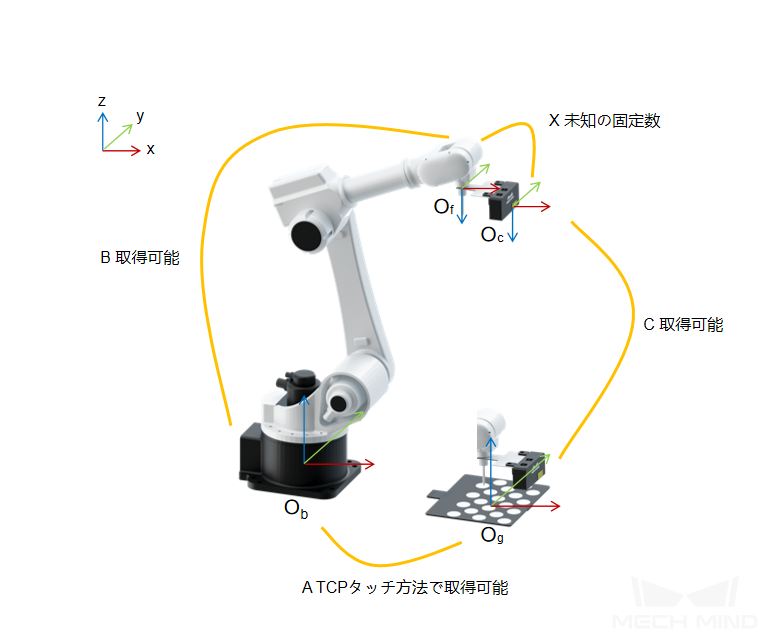
TCPタッチ方法でキャリブレーションする場合、キャリブレーションボードを作業平面に配置し、ロボット先端に既知寸法のTCP先端を取り付けます。TCP先端でキャリブレーションボードの白い円の十字型の中心にタッチします。その原理を下図に示します。A、Bの値が既知なので、Xの値を求めます。キャリブレーションボードとロボット先端は固定されておらず、TCP座標が既知のTCP先端をキャリブレーションボードの白い円にタッチさせることでAの値が求められます。
カメラ座標系とロボット座標系の対応関係を表す式は以下の通りです。
TCPタッチ法(EIH)

TCPタッチ方法でキャリブレーションする場合、キャリブレーションボードを作業平面に配置し、ロボット先端に既知寸法のTCP先端を取り付けます。TCP先端でキャリブレーションボードの白い円にタッチします。その原理を下図に示します。A、B、Cの値が既知なので、Xの値も求められます。
カメラ座標系とロボットフランジ座標系の対応関係を表す式は以下の通りです。
2台カメラ(Eye to Eye)のキャリブレーション
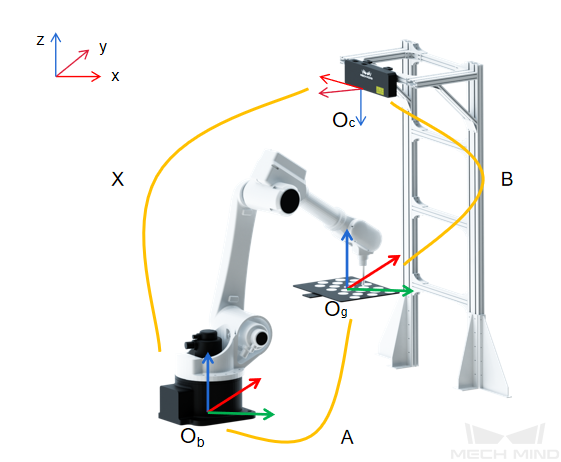
下図に示すように、2台カメラにより、カメラの視野拡大と重なる点群品質向上を実現します。
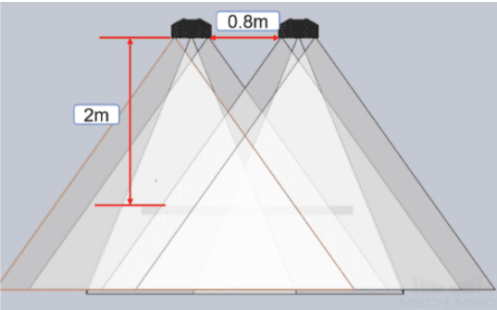
カメラ(メインカメラとサブカメラを含む)がスタンドに固定されます。2台カメラのキャリブレーションでは、各カメラの外部パラメータのキャリブレーションと、2つのカメラ間の位置姿勢関係のキャリブレーションの両方が行われます。Mech-Visionでは、これに対応可能なEye to Eyeキャリブレーションを提供しています。
|
使用する2台のカメラは同じ解像度で、作業領域全体がカメラの視野(2D・3D)の重なり合う領域に入っていることが必要です。 |
2台カメラのキャリブレーションは、標準キャリブレーション法によるキャリブレーションデータの取得にのみ対応しており、自動キャリブレーションと手動キャリブレーションの両方に対応しています。