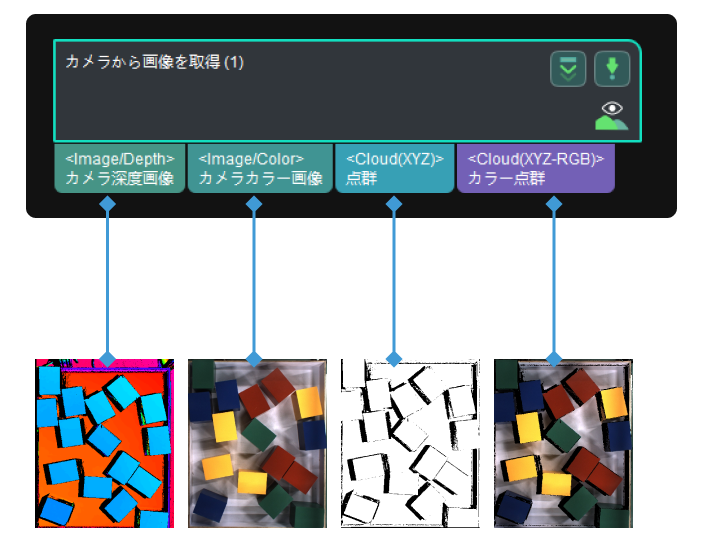
カメラから画像を取得
機能
このステップは、実際のカメラやローカルデータから、カラー画像、深度画像、点群データを取得します。
|
このステップでDEEP(V4)とLSR(V4)シリーズのカメラを接続する場合、出力されるカラー画像は、実際には2D画像(深度ソース)です。2D画像(深度ソース)を調整するには、Mech-Eye Viewerで 2D画像(深度ソース)の露光モード と 2D画像(深度ソース)の露光時間 を調整してください。 |
使用シーン
通常、Mech-Visionプロジェクトの開始入力として使用されます。Mech-Eye産業用3Dカメラやサードパーティ製のカメラからデータを取得し、または仮想モードで保存された画像データを読み取るために使用されます。
パラメータの調整説明
カメラ設定
- カメラのタイプ
-
パラメータ説明:このパラメータは、使用するカメラのタイプを選択するために使用されます。
オプション:
-
External2D:外部2Dカメラ。
-
LMI:LMIカメラ。
-
Mech-Eye:初期値、Mech-Eye産業用3Dカメラ。
-
Mech-EyeTOF: Mech-Eye産業用3Dカスタムカメラ。
-
|
調整説明:調整可能なパラメータは、カメラタイプによって異なります。実際の状況に応じて設定してください。
Mech-Eye
仮想モード を無効にする場合、実際のカメラを使用します。 仮想モード を有効にする場合、ローカルデータを使用します。デフォルトでは無効になっています。
実際カメラを使用
- カメラID
-
パラメータ説明:このパラメータは、カメラを接続し、キャリブレーションパラメータグループを選択するために使用されます。
設定方法:
-
カメラを選択 をクリックして カメラとパラメータの選択画面 が表示されます。
-
接続するカメラを選択し、
 をクリックします。
をクリックします。カメラが正常に接続されると、
ボタンが  に変わります。
に変わります。 -
接続後、 パラメータグループを選択 のドロップダウンリストからキャリブレーションパラメータグループを選択し、 OK をクリックします。
キャリブレーションパラメータグループが選択後、カメラID、 キャリブレーションパラメータグループ 、 IP と ポート が自動的に記入されます。
-
- キャリブレーションパラメータグループ
-
パラメータ説明:このパラメータは、カメラのキャリブレーションパラメータグループを選択するために使用されます。
- IP
-
パラメータ説明:このパラメータは、カメラのIPアドレスを表示するために使用されます。変更しないでください。
- ポート
-
パラメータ説明:このパラメータは、カメラのポート番号を表示するために使用されます。変更しないでください。
|
IP と ポート パラメータは、表示のみに使用されます。この2つのパラメータを変更すると、カメラは切断されます。 |
- タイムアウト
-
パラメータ説明:このパラメータは、カメラがメッセージを受信してからクライアントにデータを返すまでの最大時間(秒単位)を設定するために使用されます。次の2つの場合はタイムアウトとなります。
-
最大時間内、カメラが正常に接続されなかった
-
最大時間内、カメラが正常にデータを取得できなかった
初期値:20s
-
- 再接続の最大回数
-
パラメータ説明:このパラメータは、カメラ接続タイムアウトによりカメラ接続に失敗した場合に、カメラ接続を再試行する最大回数を指定するために使用されます。
初期値:3
- コンフィグパラメータグループ
-
パラメータ説明:このパラメータは、カメラのパラメータグループを選択するために使用されます。カメラは、現在のパラメータグループ内のパラメータに従ってデータを取得します。
|
Mech-Eye Viewerで パラメータグループを削除/追加 することができます。 |
- カメラ型番
-
パラメータ説明:読み取り専用パラメータ。このパラメータは、現在接続されているカメラの型番を表示するために使用されます。
- 2D画像のソース
-
パラメータ説明:このパラメータは、カメラが出力する2D画像のタイプを設定するために使用されます。
オプション:
-
同じソースのテクスチャ画像:初期値。2D画像(テクスチャ)、深度画像と同じ座標系、補正は不要。
-
外部カラー画像:2D画像(テクスチャ)で、使用する前に補正が必要です。このパラメータを使用するには、 深度画像の座標系に補正 にチェックを入れる必要があります。
このパラメータは、LSR (V4)とDEEP (V4)シリーズカメラにのみ適用可能です。
-
- 深度画像の座標系に補正
-
パラメータ説明:このパラメータは、外部のカラー画像を深度画像の座標系に補正するために使用されます。
初期値:チェックを入れる。
|
このパラメータは、 2D画像のソース が 外部カラー画像 の場合にのみ設定できます。 |
静的背景除去設定
- 深度画像による背景を除去
-
パラメータ説明:このパラメータは、深度画像内の背景情報を除去するために使用されます。
初期値:オフ。
- 深度背景画像
-
パラメータ説明:このパラメータは、深度背景画像の取得または読み取りに使用されます。
初期値:depth_background.png
設定方法:
-
深度背景画像ファイルを選択 をクリックし、背景設定の画面に入ります。
適切な背景画像がローカルにある場合は、手順2に進みます。
-
適切な背景画像がローカルにない場合は、手順3に進みます。
-
-
··· をクリックして画像を選択し、 確認 をクリックすると深度背景画像の選択は完了です。
-
画面の右側にある 検出されたカメラ でカメラを選択し、
をクリックしてカメラを接続します。カメラが正常に接続されると、左側の 画像ビュー でカメラから取得した深度画像が表示されます。
-
深度画像を更新する場合、 一回キャプチャ または 連続キャプチャ をクリックします。
-
背景画像のファイル名を変更する場合、 画像名 にファイル名を入力します。
-
確認 をクリックし、深度背景画像の選択は完了です。
-
- 背景深度の変動
-
パラメータ説明:このパラメータは、対象物内の点の深度と背景画像の深度を比較するために使用されます。単位はミリメートル(mm)です。点の深度と背景画像の深度がこの値より小さい場合、その点は背景点として除去されます。
初期値:10mm
- 撮影回数
-
パラメータ説明:このパラメータは、カメラ取得タイムアウトによりカメラがデータ取得に失敗した場合に、データを取得する総回数を指定するために使用されます。
初期値:3
推奨値:3
- Mech-Centerにあるロボットの名前
-
パラメータ説明:このパラメータは、ロボットサービスの名前を入力するために使用されます。Mech-Centerに接続されているロボットの名前および型番と一致する必要があります。
初期値:なし。
仮想カメラを使用
仮想モード を有効にした場合、設定が必要なパラメータは以下の通りです。
- キャリブレーションパラメータグループ
-
調整説明: 画像のデータパス を選択したら、 キャリブレーションパラメータグループ が自動的に自動的に入力されます。データパス に複数の キャリブレーションパラメータグループがある場合、このオプションのドロップダウンリストから使用するキャリブレーションパラメータグループを選択できます。
- データパス
-
パラメータ説明:このパラメータは、画像と内部・外部パラメータが格納されているフォルダを選択するために使用されます。
設定方法:右側にある
 をクリックして、画像と内部・外部パラメータが格納されているフォルダを選択します。
をクリックして、画像と内部・外部パラメータが格納されているフォルダを選択します。
|
仮想モードでは、画像ファイル名とファイル形式は以下の要件に従う必要があります。
カメラがEye-in-Hand方式で取り付けられている場合、画像番号とフランジ位置姿勢が対応していることに注意してください。 |
仮想カメラアシスタント
-
以下の場合で、画像データを選択するための 仮想カメラアシスタント がトリガーされます。
-
データパス にパスを入力していない場合。
-
選択されたフォルダには複数グループのデータがある場合。
-
選択されフォルダにはカラー画像や深度画像、内部・外部パラメータデータが欠落している場合。
-
-
仮想カメラアシスタントを使用する場合、データの読み取り手順は以下の通りです。
-
仮想カメラアシスタント で
 をクリックし、データパスを選択します。
をクリックし、データパスを選択します。パスを選択した後、 カメラID と パラメータグループ が自動的に記入されます。
-
次に 検証 をクリックすると、 カメラパラメータグループが更新されました。 というメッセージが表示されます。
-
をクリックし、カラー画像、深度画像およびフランジ位置姿勢が格納されているフォルダを選択します。選択したら、 確認 をクリックします。
-
|
カメラがEye in Hand方式で取り付けられた場合にのみ、フランジ位置姿勢の追加が必要です。 |
-
最後に、表示される 設定済み の画面で OK をクリックします。
|
仮想モードでは、データパス下の画像データが変更された場合、データパスの再選択が必要です。そうしないと、変更された画像データを読み取ることはできません。 |
- プレイモード
-
パラメータ説明:このパラメータは、画像の読み取り順序を指定するために使用されます。
オプション
-
順次読み込み:初期値。フォルダ内の画像順序で画像を読み取ります。
-
1つ繰り返し:現在の画像を繰り返し読み取ります。
-
すべて繰り返し:すべての画像を順番に読み取り、最後の1枚の読み取りが終わった時点で最初から読み取ります。
-
ランダム読み込み:画像をランダムに読み取ります。
調整説明:実際のニーズに応じて選択してください。
-
- 現在のフレーム
-
パラメータ説明:このパラメータは、現在読み込んでいる画像の番号や時刻を表示するために使用されます。
- 画像名タイプ
-
パラメータ説明:このパラメータは、 カラー画像のパス の出力ポートから出力された画像名のタイプを選択するために使用されます。
オプション:フルパス、ベース名、ファイル名。
初期値:フルパス。
静的背景除去設定
- 深度画像による背景を除去
-
パラメータ説明:このパラメータは、深度画像内の背景情報を除去するために使用されます。
初期値:オフ。
- 深度背景画像
-
パラメータ説明:このパラメータは、深度背景画像の取得または読み取りに使用されます。
初期値:depth_background.png
設定方法:
-
深度背景画像ファイルを選択 をクリックし、背景設定の画面に入ります。
-
適切な背景画像がローカルにある場合は、手順2に進みます。
-
適切な背景画像がローカルにない場合は、手順3に進みます。
-
-
··· をクリックして画像を選択し、 確認 をクリックすると深度背景画像の選択は完了です。
-
画面の右側にある 検出されたカメラ でカメラを選択し、
をクリックしてカメラを接続します。カメラが正常に接続されると、左側の 画像ビュー でカメラから取得した深度画像が表示されます。
-
深度画像を更新する場合、 一回キャプチャ または 連続キャプチャ をクリックします。
-
背景画像のファイル名を変更する場合、 画像名 にファイル名を入力します。
-
確認 をクリックし、深度背景画像の選択は完了です。
-
- 背景深度の変動
-
パラメータ説明:このパラメータは、対象物内の点の深度と背景画像の深度を比較するために使用されます。単位はミリメートル(mm)です。点の深度と背景画像の深度がこの値より小さい場合、その点は背景点として除去されます。
初期値:10mm
External2D
- カメラID
-
パラメータ説明:このパラメータは、カメラを接続し、キャリブレーションパラメータグループを選択するために使用されます。
設定方法:
-
カメラを選択 をクリックして カメラとパラメータの選択画面 が表示されます。
-
接続するカメラを選択し、
をクリックします。カメラが正常に接続されると、
は に変わります。 -
接続後、 パラメータグループを選択 のドロップダウンリストからキャリブレーションパラメータグループを選択し、 OK をクリックします。
キャリブレーションパラメータグループが選択後、カメラID、 キャリブレーションパラメータグループ 、 IP と ポート が自動的に記入されます。
-
- キャリブレーションパラメータグループ
-
パラメータ説明:このパラメータは、カメラのキャリブレーションパラメータグループを選択するために使用されます。
- IP
-
パラメータ説明:このパラメータは、カメラのIPアドレスを表示するために使用されます。変更しないでください。
- ポート
-
パラメータ説明:このパラメータは、カメラのポート番号を読み取るために使用されます。
|
IP と ポート パラメータは、読み取りのみに使用されます。この2つのパラメータを変更すると、カメラは切断されます。 |
- タイムアウト
-
パラメータ説明:このパラメータは、カメラがメッセージを受信してからクライアントにデータを返すまでの最大時間(秒単位)を設定するために使用されます。次の2つの場合はタイムアウトとなります。
-
最大時間内、カメラが正常に接続されなかった
-
最大時間内、カメラが正常にデータを取得できなかった
初期値:20s
-
- 再接続の最大回数
-
パラメータ説明:このパラメータは、カメラ接続タイムアウトによりカメラ接続に失敗した場合に、カメラ接続を再試行する最大回数を指定するために使用されます。
初期値:3
- Auto
-
パラメータ説明:このパラメータは、自動露光を使用するかどうかを設定するために使用されます。
初期値:チェックを入れる
- 平均諧調値
-
パラメータ説明:このパラメータは、期待される画像グレースケール値を設定するために使用されます。値が高いほど画像は明るくなり、値が低いほど画像は暗くなります。
初期値:100
- 露光時間
-
パラメータ説明:このパラメータは画像の明るさに影響します。値が高いほど画像は明るくなり、値が低いほど画像は暗くなります。
初期値:10
- 撮影回数
-
パラメータ説明:このパラメータは、カメラ取得タイムアウトによりカメラがデータ取得に失敗した場合に、データを取得する総回数を指定するために使用されます。
初期値:3
推奨値:3
- Mech-Centerにあるロボットの名前
-
パラメータ説明:このパラメータは、ロボットサービスの名前を入力するために使用されます。Mech-Centerに接続されているロボットの名前および型番と一致する必要があります。
初期値:なし。
LMI
- カメラID
-
パラメータ説明:このパラメータは、カメラを接続し、キャリブレーションパラメータグループを選択するために使用されます。
設定方法:
-
カメラを選択 をクリックして カメラとパラメータの選択画面 が表示されます。
-
接続するカメラを選択し、
をクリックします。カメラが正常に接続されると、
ボタンが に変わります。 -
接続後、 パラメータグループを選択 のドロップダウンリストからキャリブレーションパラメータグループを選択し、 OK をクリックします。
キャリブレーションパラメータグループが選択後、カメラID、 キャリブレーションパラメータグループ 、 IP と ポート が自動的に記入されます。
-
- キャリブレーションパラメータグループ
-
パラメータ説明:このパラメータは、カメラのキャリブレーションパラメータグループを選択するために使用されます。
- IP
-
パラメータ説明:このパラメータは、カメラのIPアドレスを表示するために使用されます。変更しないでください。
- 撮影回数
-
パラメータ説明:このパラメータは、カメラ取得タイムアウトによりカメラがデータ取得に失敗した場合に、データを取得する総回数を指定するために使用されます。
初期値:3
推奨値:3
- Mech-Centerにあるロボットの名前
-
パラメータ説明:このパラメータは、ロボットサービスの名前を入力するために使用されます。Mech-Centerに接続されているロボットの名前および型番と一致する必要があります。
初期値:なし。