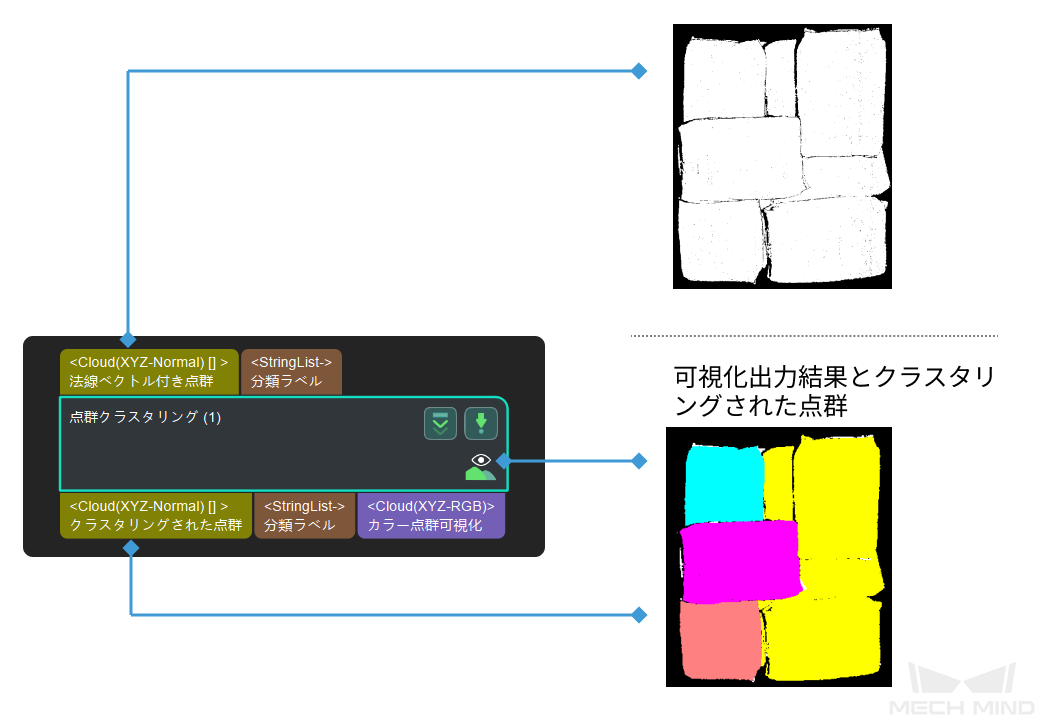
点群クラスタリング

使用シーン
通常、点群前処理に使用され、干渉点群を除去します。
点群クラスタリングは、ユークリッド距離に基づいたクラスタリング(EuclideanCluster)と領域成長セグメンテーション(RegionGrowingSeg)の2つの方法があります。
点群が空間的に分離されている場合は、ユークリッド距離に基づいたクラスタリング方法(EuclideanCluster)を推奨します。点群が空間的に連続しているが、接続の曲率が大きく変化する場合は、領域成長セグメンテーション方法(RegionGrowingSeg)を推奨します。
パラメータの説明
クラスタリングアルゴリズム
初期値:EuclideanCluster
オプション:EuclideanCluster、RegionGrowingSeg
調整説明:このパラメータはクラスタリングの二つの方法を選択します。現場ではEuclideanClusterを使用することを推奨します。まずこれについて説明します。
-
EuclideanCluster :距離によって同じ種類に属するかを判断します。
-
RegionGrowingSeg :法線ベクトルと曲率によって同じ種類に属するかを判断します。
EuclideanCluster
- 出力クラスター内の隣接点の最大距離
-
初期値:3.000 mm パラメータ説明:このパラメータは、クラスタリングの許容誤差(ミリメートル単位)を設定するために使用されます。
調整説明:値を大きくしたら間隔が長い点は同じクラスに分類されます。小さくすれば間隔が近い点は異なるクラスに分類されます。
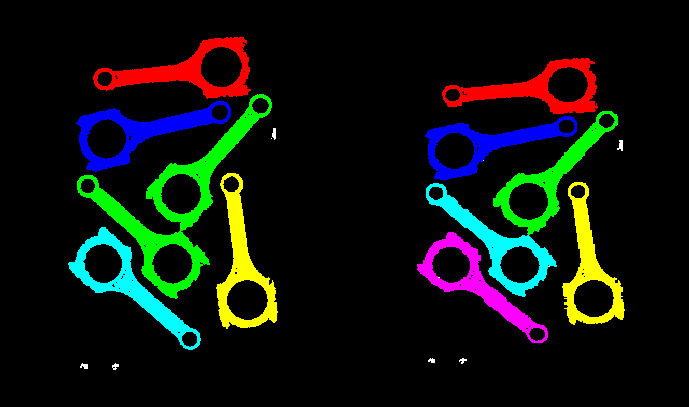
調整の例:下図に示します。左図は5.000mmにした結果で、右図は初期値3.000mmにした結果です。真ん中の緑の点群は異なるクラスに分類されます。
- ユークリッドクラスター
-
初期値:4
調整説明:このパラメータはエリア成長プロセスに隣接点の法線ベクトル角度差のしきい値を調整します。値を大きくしたら隣接点の法線ベクトル角度差の許容値は大きくなり、角度差が大きい点でも同じクラスに分類されます。
RegionGrowingSeg
- 隣接点の個数
-
初期値:30
調整説明:このパラメータはエリア成長プロセスに検索ピクセル数を調整します。値を大きくしたら検索するピクセル数は多くなり、エリア成長の速度は速くなるのでクラスタリングによって取得するクラスターも少なくなります。
- 平滑しきい値
-
初期値:4
調整説明:このパラメータはエリア成長プロセスに隣接点の法線ベクトルの角度差のしきい値を調整します。値を大きくしたら隣接点の法線ベクトルの角度差の許容値は大きくなり、角度差が大きい点でも同じクラスに分類されます。
- 曲率しきい値
-
初期値:1
調整説明:このパラメータはエリア成長プロセスに点の曲率のしきい値の上限を調整します。
- クラスター内の最小点数
-
初期値:800
調整説明:このパラメータはクラスタリングされた結果をフィルタリングします。点数がクラスターの最小点数より大きいクラスターは出力されます。値を大きくしたら最終的に出力されるクラスターの数は少なくなります。小さくしたら最終的に出力されるクラスターの数は多くなります。
クラスター内の最大点数
初期値:3000000
調整説明:このパラメータはクラスタリングされた結果をフィルタリングします。点数がクラスターの最小点数より小さいクラスターは出力されます。値を大きくしたら最終的に出力されるクラスターの数は多くなりますが、多き過ぎると大きな影響は出ません。小さくしたら最終的に出力されるクラスターの数は少なくなります。
調整の例:点群クラスタリングは5つのクラスターを生成し、点数は10000、20000、30000、40000、50000とします。クラスターの最大点数を45000に、最小点数を15000に設定したら、点数が10000と50000のクラスターは除去され、点数が20000、30000、40000のクラスターだけが出力されます。
- GPUを使用
-
初期値:チェックを入れない
調整説明:このパラメータは、GPUを使用して計算を加速するかを設定するために使用されます。