ロボット構造のタイプ
| 軸数 | 6 軸 | 6 軸 | |
|---|---|---|---|
構造 |
構造名 |
UR_UR5_Like |
SphericalWrist_SixAxis |
説明 |
6 軸協働ロボット |
一般的な産業用 6 軸ロボット |
|
ロボット構造のタイプ |
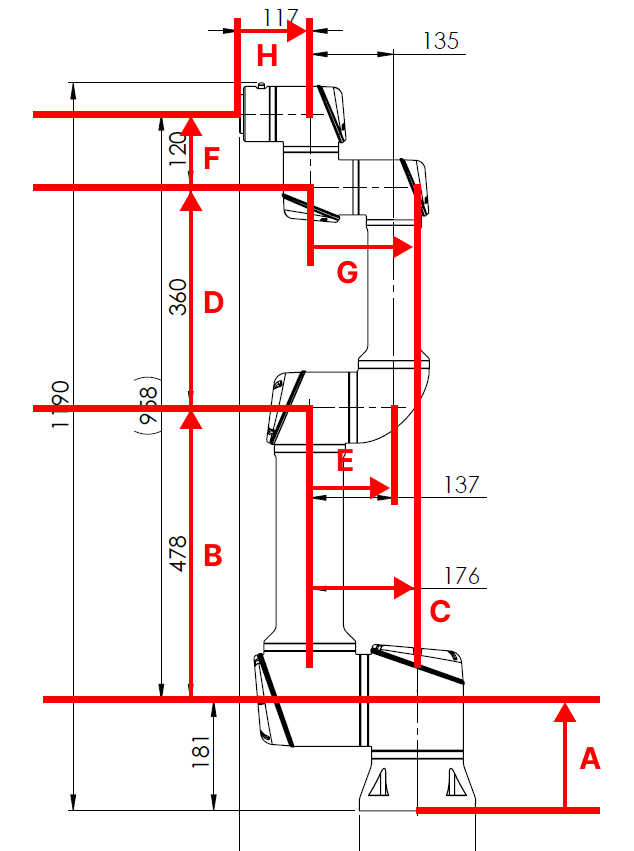
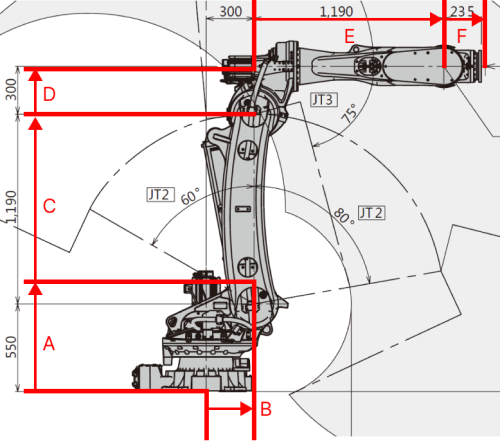
DH パラメータ図 |
|
|
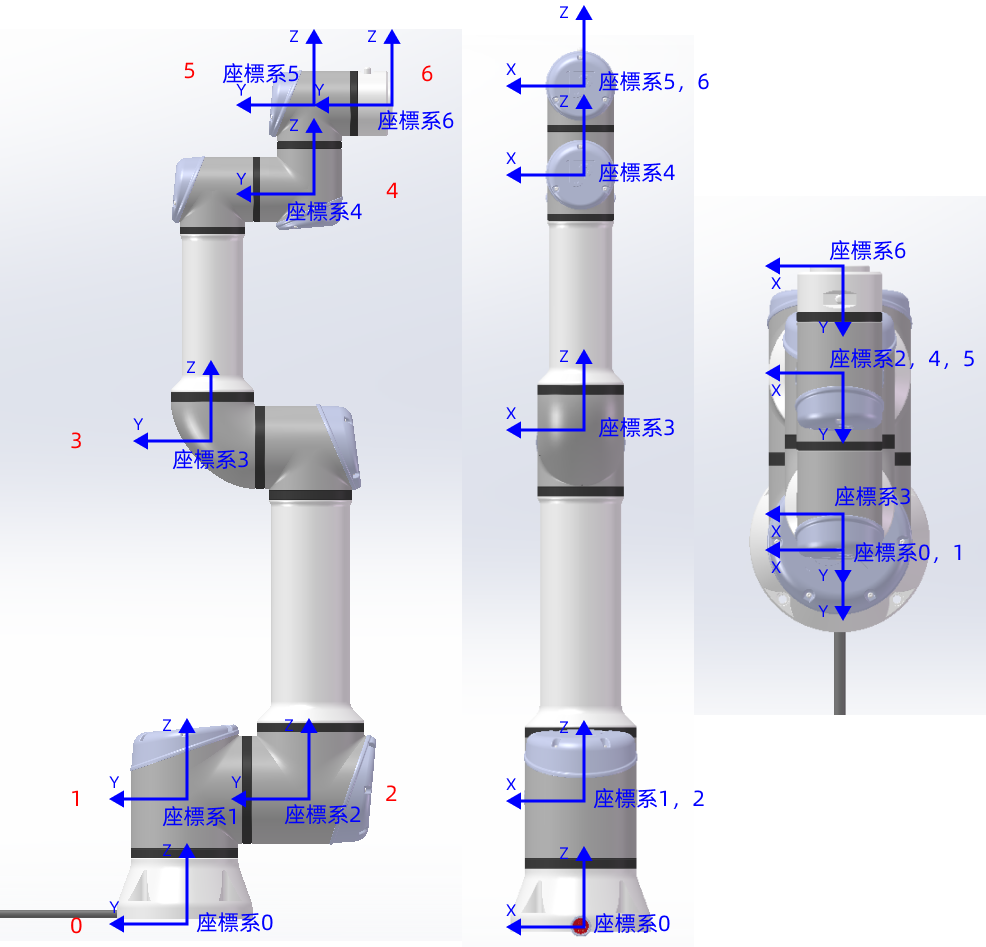
座標系 各軸名 |
|
|
|
リンク、座標系、対応関係 |
0:座標系10、 1:座標系10、 2:座標系2、 3:座標系3、4:座標系4; 5:座標系5; 6:座標系6 |
||
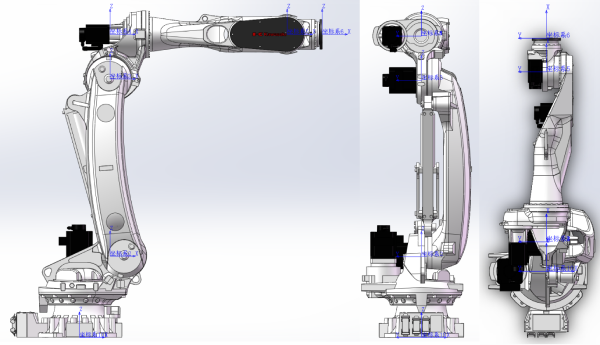
[robot]_algo の例 |
|
|
|
| 軸数 | 6 軸 | 6 軸 | |
|---|---|---|---|
構造 |
構造名 |
UR_UR5_Like |
SphericalWrist_SixAxis |
説明 |
6 軸協働ロボット |
一般的な産業用 6 軸ロボット |
|
ロボット構造のタイプ |
DH パラメータ図 |
|
|
座標系 各軸名 |
|
|
|
リンク、座標系、対応関係 |
0:座標系10、 1:座標系10、 2:座標系2、 3:座標系3、4:座標系4; 5:座標系5; 6:座標系6 |
||
[robot]_algo の例 |
|
|
|