把持位置姿勢を予測(V2)
使用シーン
このステップは通常、バラ積みされた様々な種類の対象物を仕分けるために使用されます。スケーリングされた深度画像、点群、ROI情報を取得するために、ステップ 2D ROI内の画像をスケーリング の後に使用されます。
入力と出力
このステップでは、デフォルトではポートは表示されません。ステップパラメータで 把持設定のフォルダパス を設定すると、フォルダに従って入力ポートと出力ポートが生成されます。
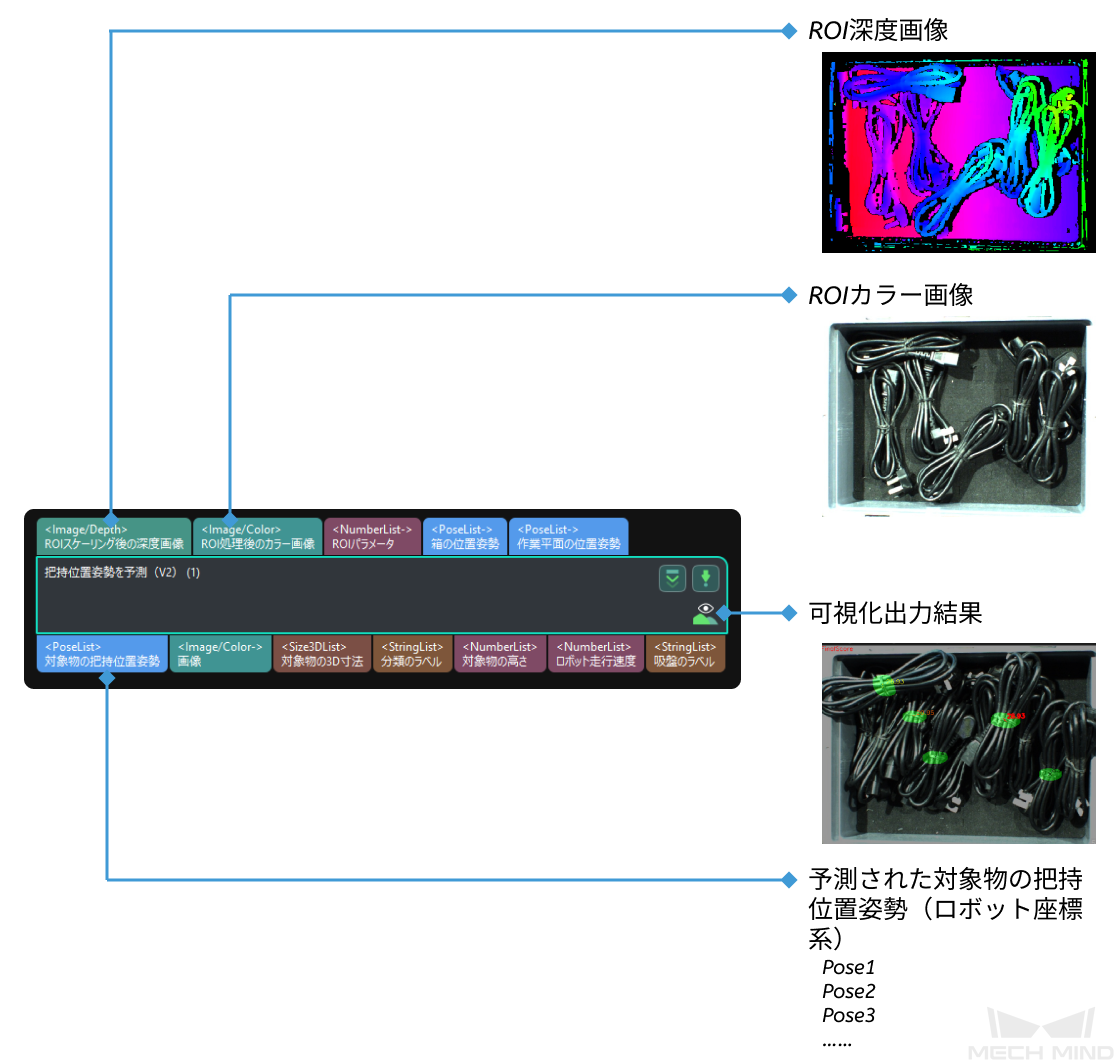
例えば、箱形対象物の把持設定フォルダを設定すると、このステップの入出力を下図に示します。
パラメータ説明
サーバー
- サーバーIP
-
パラメータ説明:このパラメータは、ディープラーニングサーバーのIPアドレスを設定するために使用されます。
初期値:127.0.0.1
調整説明:実際のニーズに応じて設定してください。
- サーバーポート(1-65535)
-
パラメータ説明:このパラメータは、ディープラーニングサーバーのポート番号を設定するために使用されます。
初期値:60054
設定可能な範囲:60000~65535
調整説明:実際のニーズに応じて設定してください。
推論設定
- 推論モード
-
パラメータ説明:ディープラーニングモデルの推論モードを選択します。
オプション:GPU、CPU
-
GPU:GPUを使用してモデルを推論する前に、モデルを最適化し、最適化されたモデルを使用して推論を行います。最初にモデルを最適化する際には、10〜30分かかります。
-
CPU:ディープラーニングモデルの推論にCPUを使用します。GPUと比較して、推論にかかる時間が長くなり、認識精度が低下することがあります。
初期値:GPU
調整説明:推論速度はGPU>CPUです。推論モードを切り替えた後、ディープラーニングサーバーを再起動する必要があります。
-
把持設定
- 把持設定のフォルダパス
-
パラメータ説明:このパラメータは、把持設定フォルダのパスを設定するために使用されます。把持設定のフォルダパスを設定した後、ステップは異なるフォルダに従って異なる入力ポートと出力ポートを生成します。
調整説明:実際のニーズに応じて設定してください。薬の外箱の把持設定フォルダを提供しています。
使用シーン 把持設定のフォルダ 取得方式 パラメータ説明 薬の外箱
MedicineBox_Instance_3DSize_RGBSuction
把持設定フォルダは、ソリューションライブラリの「箱」ソリューションと一緒にダウンロードできます。
取得される設定フォルダには、2つのJSONファイルと1つのmodelフォルダが含まれており、ディープラーニングモデルはmodelフォルダ内にあります。パスを追加する際は、一番外側のフォルダのみを使用し、modelフォルダに選択する必要がありません。そうしないとエラーが発生する可能性があります。
パスの選択例:D:/ConfigurationFiles/MedicineBox_Instance_3DSize_RGBSuction