点群変換
使用シーン
通常、点群がカメラ座標系とロボット座標系との間の相互変換に使用されます。
プロジェクトで直行ロボットが使用されている場合、 点群変換(直行ロボット) ステップを使用する必要があります。
パラメータの説明
変換設定
- 変換方法
-
パラメータ説明:このパラメータは、点群の変換方法を設定するために使用されます。
初期値:CameraToRobot
オプション:CameraToRobot、RobotToCamera、AllWithFirst、FirstWithAll、UseCorrespondenceInput、AffineTransform
調整説明:
-
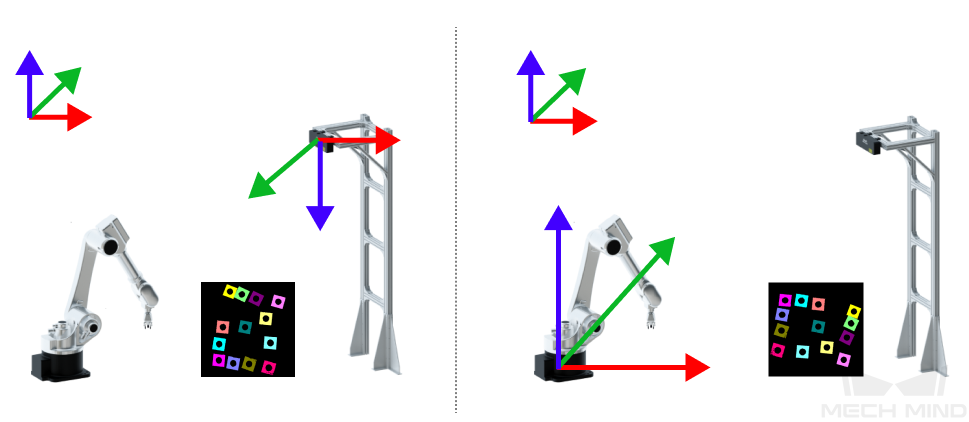
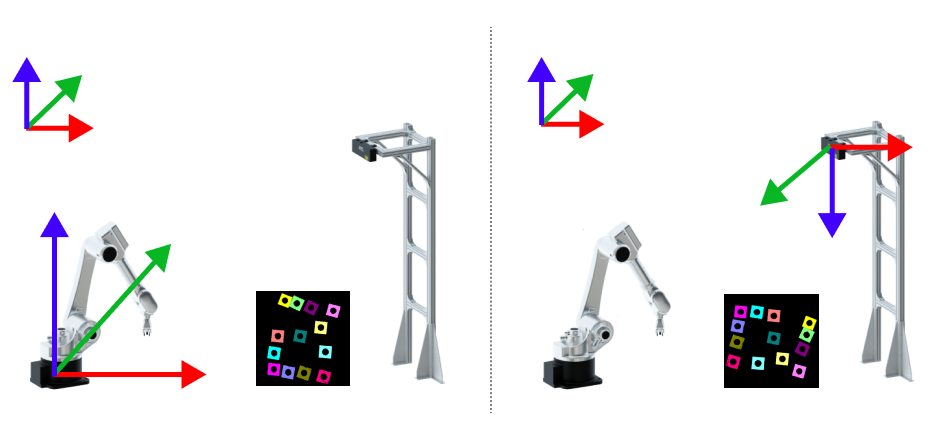
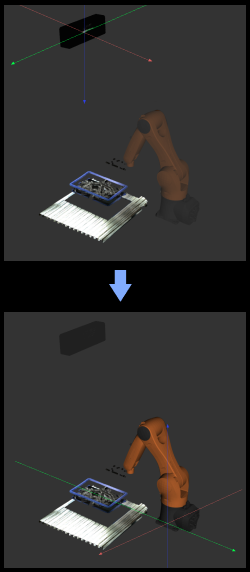
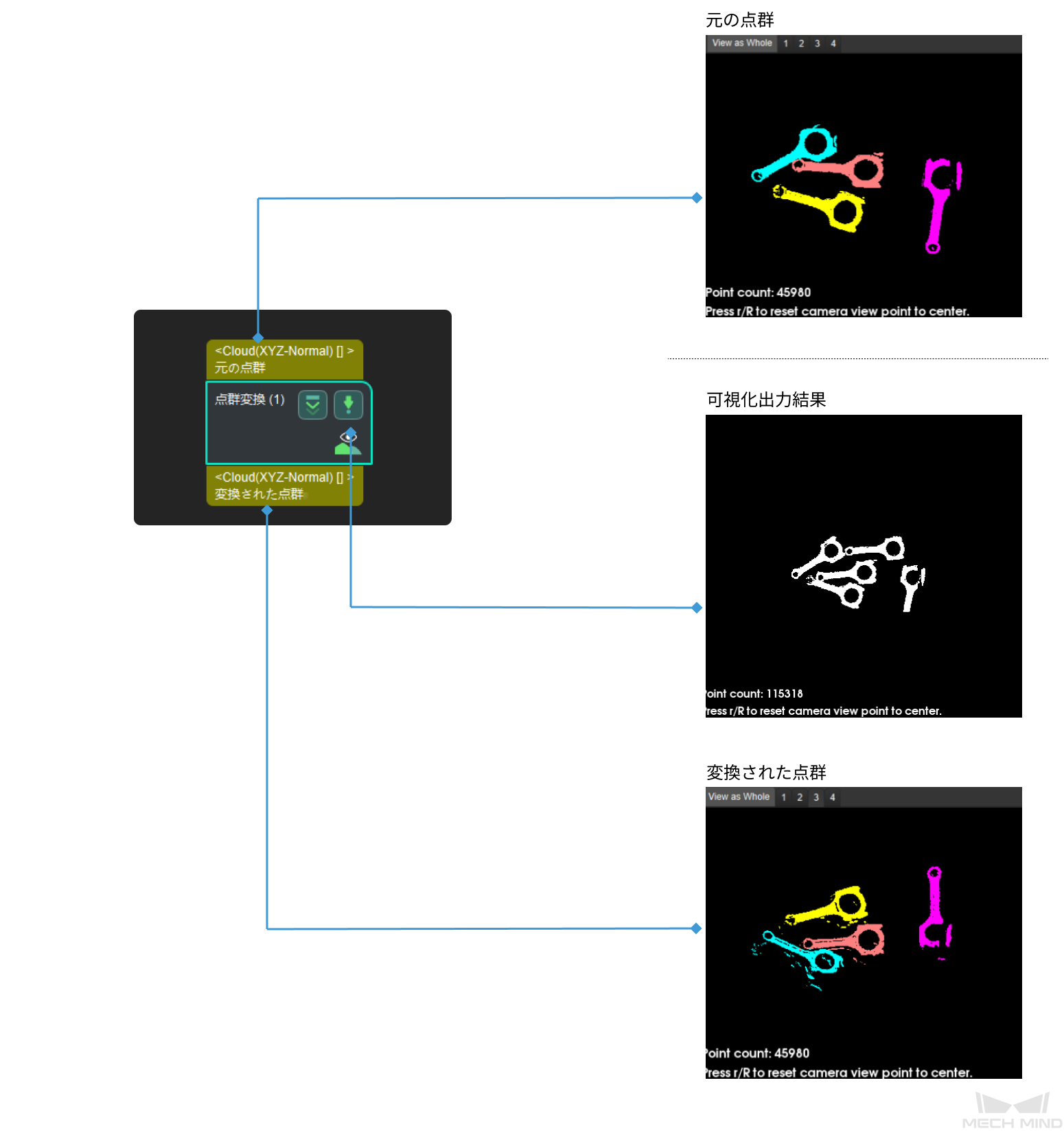
CameraToRobot:点群をカメラ座標系からロボット座標系に変換します。調整効果を 調整の例 に示します。
-
RobotToCamera:点群をロボット座標系からカメラ座標系に変換します。調整効果を 調整の例 に示します。
-
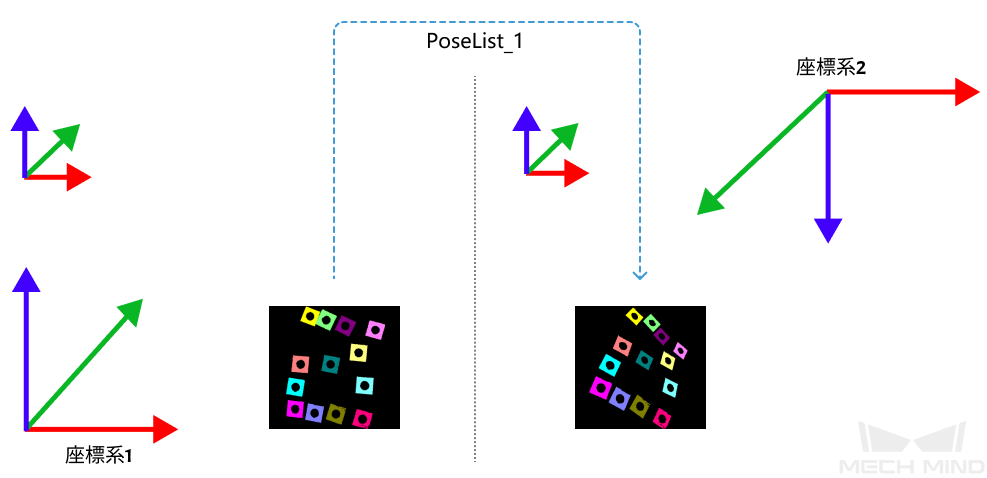
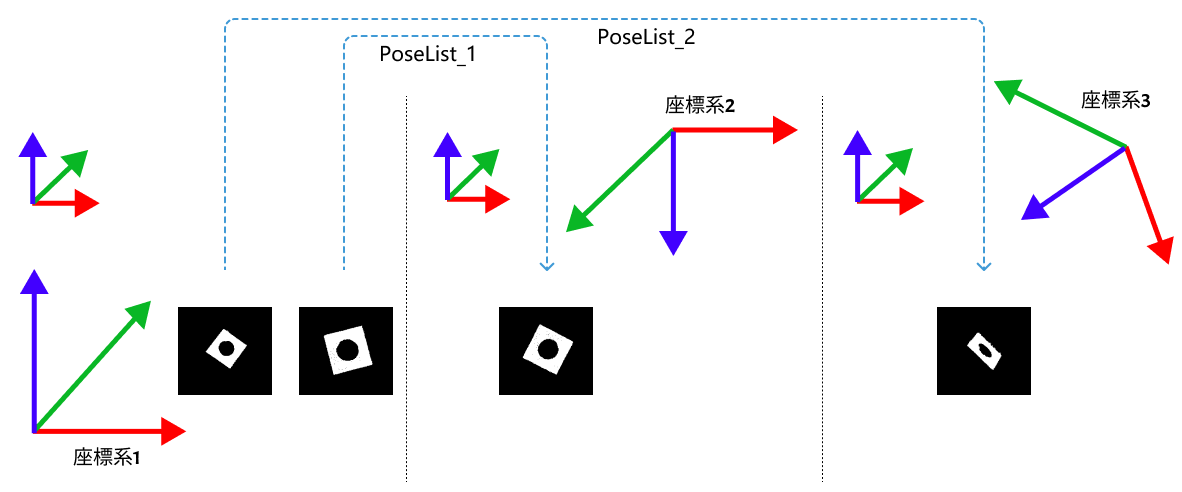
AllWithFirst:最初の入力基準位置姿勢を使用して点群を変換します。基準位置姿勢リストの入力が必要です。調整効果を 調整の例 に示します。
-
FirstWithAll:入力のすべての基準位置姿勢を使用して最初の点群を変換します。基準位置姿勢リストの入力が必要です。調整効果を 調整の例 に示します。
-
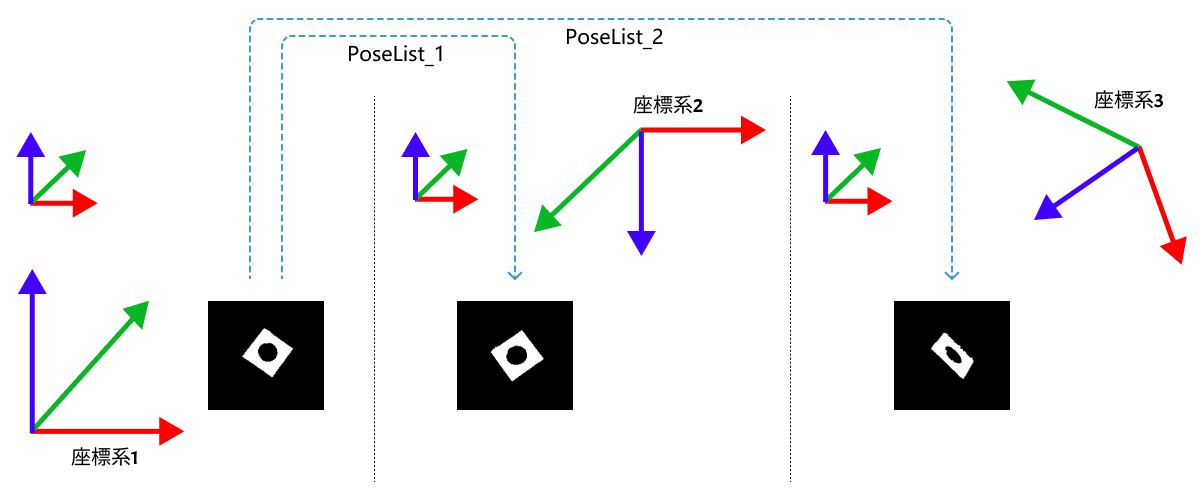
UseCorrespondenceInput:全ての点群を基準位置姿勢の座標系に一対一に変換します。基準位置姿勢リストを入力する必要があり、入力位置姿勢の数は基準位置姿勢の数と同じです。調整効果を 調整の例 に示します。
-
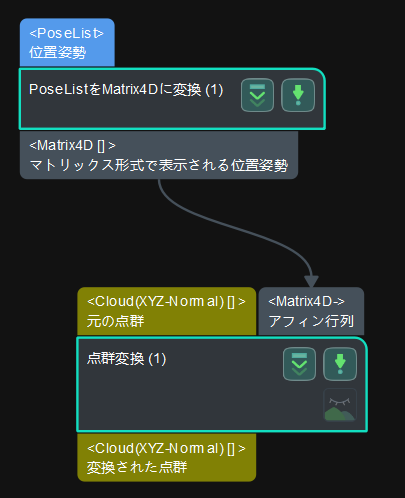
AffineTransform:変換行列を使用して点群を変換します。下図に示すように、「PoseListをMatrix4Dに変換」ステップにより、postlistをmatrix4D入力に変換してから、本ステップのMatrix4D入力ポートに入力できます。調整効果を 調整の例 に示します。
-