ユーザーインターフェイス
Mech-Viz を起動した後、下図のような画面が表示されます。プロジェクトを新規作成 または 最近使ったプロジェクトを開く ことができます。
-
プロジェクトを新規作成
-
プロジェクトを新規作成 をクリックします。
-
表示された画面の左上にロボット型番を入力するか、またはブランドなどからロボットを選択します。使用するロボットが見つからない場合、以下の手順を実行してください:
-
オンラインロボットライブラリをクリックして使用するロボットのモデルをダウンロードします。オンラインロボットライブラリにもない場合、ロボットモデルの作成とインポートをお読みください。
-
プロジェクトを新規作成画面を閉じてからロボットモデルをソフトウェアにドラッグするか、またはをクリックして表示された画面でダウンロードしたファイルを選択します。
-
プロジェクトを新規作成をクリックしてロボットを再度検索します。
-
-
使用するロボットをダブルクリックするか、またはカーソルを使用するロボットに合わせて選択をクリックします。
-
-
最近使ったプロジェクトを開く
最近使ったプロジェクトを開くをクリックして、使用するプロジェクトをダブルクリックするか、またはプロジェクトを選択してから開くをクリックします。
これで表示されているメインインターフェイスは下図のようです。
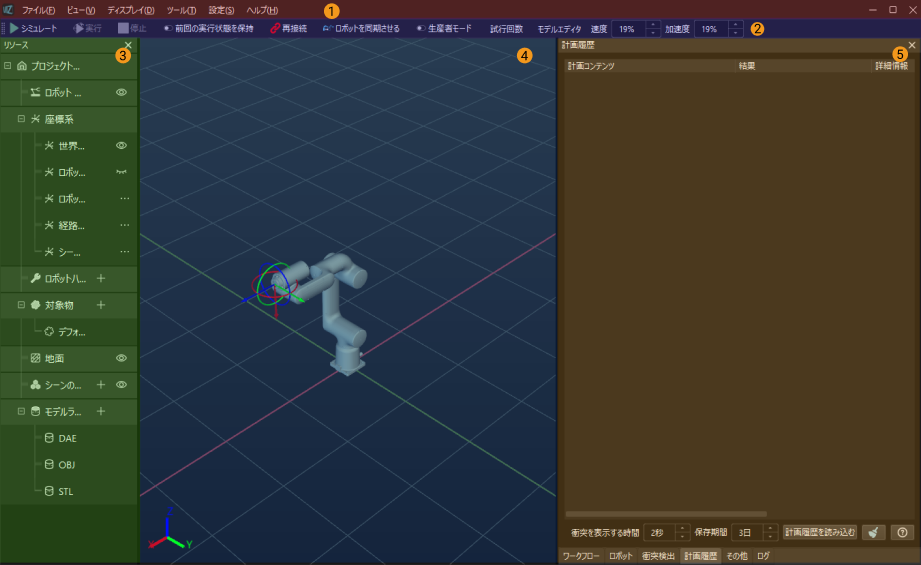
メインインターフェイスは五つの部分で構成されています:
1 |
メニューバー |
|
2 |
ツールバー |
プロジェクトのシミュレートやロボットの制御、ロボット運動速度の調整などの機能がある
|
3 |
リソース |
プロジェクトに使用するロボットハンドや対象物、シーンの物体などのリソースを管理する
|
4 |
仮想空間 |
プロジェクトを実行またはシミュレートするときにロボットの運動経路や衝突検出の結果、ビジョン位置姿勢、点群などを表示する
|
5 |
機能パネル |