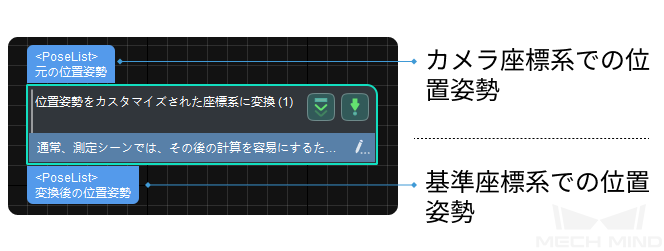
位置姿勢をカスタマイズされた座標系に変換
機能
計算を容易にするために、測定対象物の中心位置姿勢を基準座標系に変換します。変換流れは以下の通りです。
-
カメラ座標系での位置姿勢を、最初にカスタマイズされた座標系での位置姿勢に変換します。
-
最初にカスタマイズされた座標系での位置姿勢を、基準座標系での位置姿勢に変換します。
|
このステップが大型部品の測定シーンに使われる場合、最初にカスタマイズされた座標系は通常、部品座標系となります。 |
使用シーン
通常、大型部品の測定シーンに使用されます。前に 丸穴の中心位置姿勢と直径を計算 をつなぐ場合、丸穴を検出してカメラ座標系での丸穴の中心位置姿勢を出力します。前に 長穴の中心位置姿勢と長軸・短軸を計算 をつなぐ場合、長穴を検出してカメラ座標系での長穴の中心位置姿勢を出力します。