シーンの物体を更新
パラメータ
非移動ステップの共通パラメータ
実行をスキップ
| スキップしない |
初期値、このステップをスキップしません。 |
| シミュレーション時 |
シミュレーションを実行する時にこのステップをスキップします。出口は スキップ時の出口のインデックス によって決定されます。 |
| いつも |
シミュレーション時も実際に実行中にも実行をスキップします。出口は スキップ時の出口のインデックス によって決定されます。 |
| 調整説明 |
シミュレーション時 または いつも に設定すると、プロジェクト実行中にこのステップをスキップして後のステップを実行します。プロジェクトに「DI をチェック」ステップを配置したら、シミュレーション時に外部信号がなく、実行をスキップしなければプロジェクトの実行はここで停止することになります。このパラメータを設定すると、このステップを実行せずに次のステップを実行してシミュレーションを完了します。 |
情報出所を更新
シーンの物体の位置姿勢と寸法の情報の出所を指定します。パラメータ設定から と ビジョンサービスから が選択できます。
パラメータ設定から
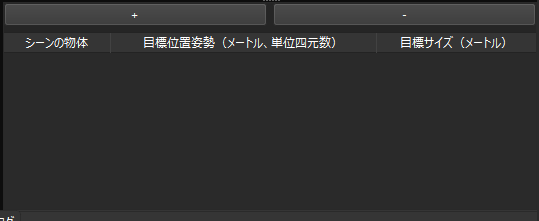
+:シーンの物体を追加します。
-:選択したシーンの物体を削除します。
実際に応じてシーンの物体を追加・削除します。リストの順序に沿って実行します。「+」をクリックしてから「シーンの物体」のドロップダウンメニューで追加したい物体の種類を選択します。それから 目標位置姿勢 と 目標サイズ を指定します。目標位置姿勢を XYZ(メートルを単位とする)形式と四元数の 7 数字を入力してください。目標サイズは XYZ 形式の 3 数字(メートルを単位とする)を入力してください。
例えば、1.00, 0.00, 0.00, 1.00, 0.00, 0.00, 0.00 の目標位置姿勢、直方体の場合に 0.40, 0.40, 1.00 (横、縦、高さ)の目標サイズ、円柱の場合に 0.50, 1.00, 0.00 (半径、高さ、0)を入力することができます。
ビジョンサービス名
ビジョンサービスを提供する Mech-Vision プロジェクトを指定します。ただし、登録済みの Mech-Vision プロジェクトでなければなりません。
Mech-Vision プロジェクトを指定したあと、以下の手順に沿って Mech-Vision プロジェクトの「出力」ステップを設定してください。
-
ステップの ポートタイプ に カスタム を選択します。
-
外部通信への出力データタイプを設定 ボタンをクリックして出力設定アシスタントウィンドウを開きます。
-
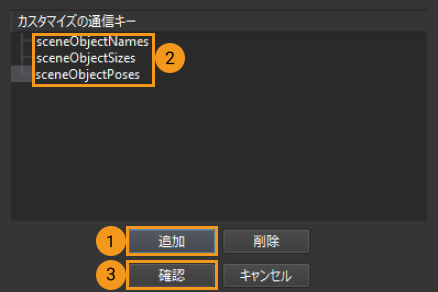
追加 をクリックして通信キーを追加できます。3つの通信キーを追加します。
-
追加された通信キーをダブルクリックしてそれぞれ sceneObjectNames、 sceneObjectSizes、sceneObjectPoses と名付けます。
-
確認 をクリックして設定を保存します。
-
出力 ステップの入力ポートを前のステップの対応する出力ポートに繋ぎます。
| ビジョンサービスからの結果 | 説明 |
|---|---|
sceneObjectNames |
更新する Mech-Viz プロジェクトのシーンの物体名に対応する |
sceneObjectSizes |
XYZ の3つの値(メートルを単位とする)が必要 |
sceneObjectPoses |
XYZ の3つの値(メートルを単位とする)と四元数の 7 数字が必要 |