シーンの物体を更新
パラメータ
情報出所を更新
シーンの物体の位置姿勢と寸法の情報の出所を指定します。「情報出所を修正」にパラメータ設定とビジョンサービスが選択可能です。
パラメータ設定から
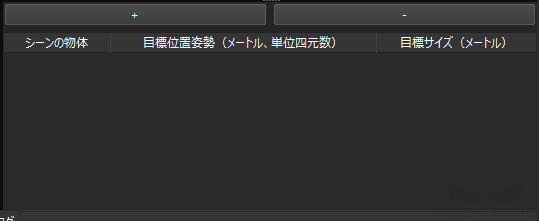
+:リストに更新するシーンの物体を追加します。
-:選択されたシーンの物体を削除します。
必要に応じてシーンの物体を追加・削除してください。実行する時、ソフトウェアは順に上から処理します。
シーンの物体を追加した後、ドロップダウンリストから更新する物体を選択して目標位置姿勢と目標寸法を設定します。目標位置姿勢は、XYZ 座標(単位:メートル)と四元数の計 7つの値があります。目標寸法は、XYZ 値(単位:メートル)の 3つの値があります。
例えば、1.00, 0.00, 0.00, 1.00, 0.00, 0.00, 0.00 の目標位置姿勢、直方体の場合に 0.40, 0.40, 1.00 (横、縦、高さ)の目標サイズ、円柱の場合に 0.50, 1.00, 0.00 (半径、高さ、0)を入力することができます。
ビジョンサービスから
| ビジョンサービスからシーンの物体を更新する時、その前のワークフローにビジョン処理による認識ステップが配置されていることを確認してください。 |
ビジョンサービス名
ビジョンサービスを提供する Mech-Vision プロジェクトを指定します。
-
Mech-Vision プロジェクトの「出力」ステップのポートタイプが事前定義済み(ビジョン結果)の場合、以下の手順で続けて設定します。
-
シーンの物体の更新設定 の下の シーンの物体の更新設定 にチェックを入れます。
-
追加された入力ポートを前のステップの対応する出力ポートに繋ぎます。
-
-
Mech-Vision プロジェクトの「出力」ステップのポートタイプがカスタムの場合、以下の手順で続けて設定します。
-
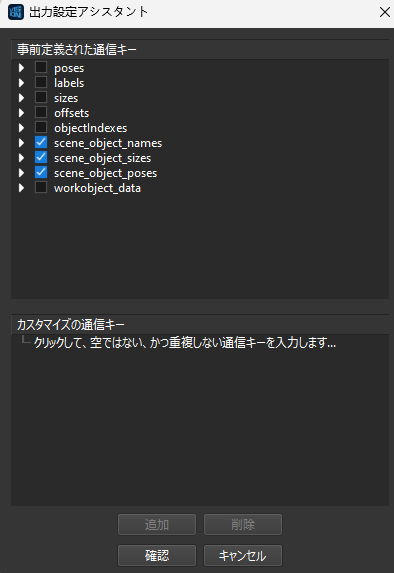
エディタを開くボタンをクリックして出力設定アシスタントウィンドウを開きます。
-
事前定義された通信キーの scene_object_names、scene_object_sizes、scene_object_poses にチェックを入れます。
-
確認 をクリックして設定を保存します。
-
追加された入力ポートを前のステップの対応する出力ポートに繋ぎます。
-
| ビジョンサービスからの結果 | 説明 |
|---|---|
scene_object_names |
更新する Mech-Viz プロジェクトのシーンの物体名に対応する |
scene_object_sizes |
XYZ 値(単位:メートル)の 3つの値。直方体の場合は横、幅、高さ。円柱は半径、高さ、0 |
scene_object_poses |
XYZ 座標(単位:メートル)と四元数の計 7つの値 |