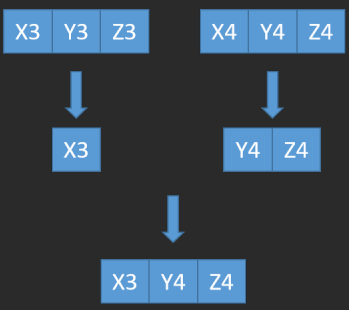
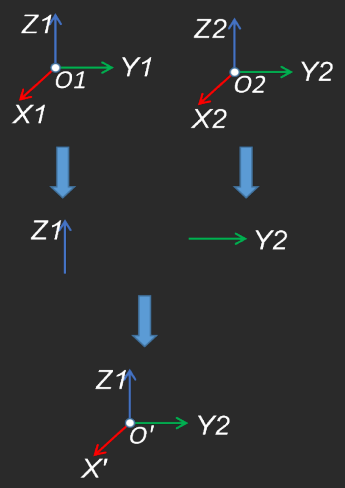
各入力位置姿勢を一部抽出して新しい位置姿勢を合成
パラメータ説明
可視化設定
| パラメータ | 説明 | ||||
|---|---|---|---|---|---|
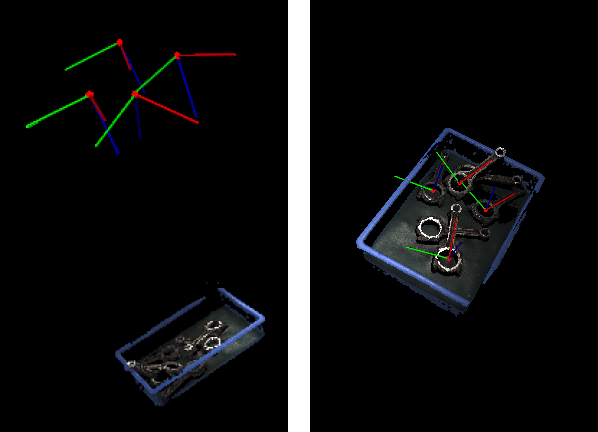
選択された座標系で点群を表示 |
パラメータ説明:ロボット座標系またはカメラ座標系で点群を表示します。 初期値:ロボット座標系 オプション:ロボット座標系、カメラ座標系 調整説明:カメラ座標系 を選択する場合、デバッグ結果出力のウィンドウにカメラ座標系での可視化出力結果が表示されます。ロボット座標系 を選択する場合、デバッグ結果出力のウィンドウにロボット座標系での可視化出力結果が表示されます。調整効果を 調整の例 に示します。
|
||||
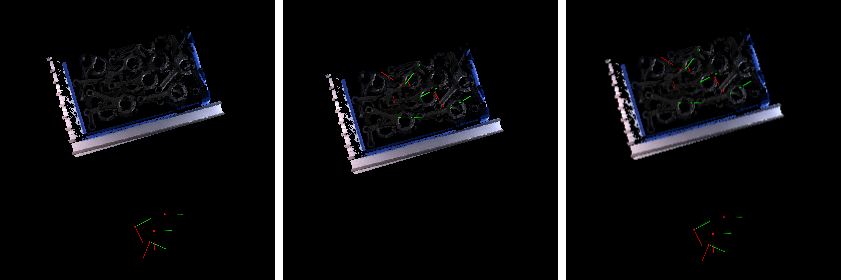
位置姿勢表示の設定 |
パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
|
| パラメータ | 説明 |
|---|---|
4番目の入力の使用軸 |
パラメータ説明:このパラメータは、4番目のの入力位置姿勢で使用する位置座標軸を指定し、設定可能な位置入力が基準位置に与える影響範囲を制御します。
|