点群モデルを使用せずにワークを設定
この設定フローでは、把持位置姿勢、把持戦略および衝突モデルを設定します。
ワークライブラリで 点群モデルを作成せずに設定 の下にある 選択 をクリックすると、設定フローの詳細が表示されます。主な設定フローは下図に示します。

-
把持位置姿勢を設定:把持位置姿勢を調整したり、把持位置姿勢の配列を追加したりします。
-
衝突モデルを設定(オプション):衝突モデルを生成し、経路計画時の衝突検出に使用します。
以下は、設定フローの詳細な説明です。
把持位置姿勢を設定
|
このフローで作成されたワークモデルには、1つの把持点のみが含まれます。また、この把持点の位置姿勢は調整できず、新しい把持点の追加もサポートされていません。 |
把持位置姿勢の配列を設定
ワークに対称性がある場合、対象物中心点に基づいて把持位置姿勢の配列を設定できます。把持位置姿勢の配列を設定することで、ロボットハンドがワークを把持する際に不要な回転を低減することができます。これにより、経路計画の成功率が向上し、計画時間が短縮され、ロボットがよりスムーズかつ迅速に動作できるようになります。設定方法は以下の通りです。
-
把持位置姿勢を設定 の下にある 生成 をクリックし、把持位置姿勢の配列を生成します。
-
対称性のタイプ を参照して対称軸を選択し、その後、対称回数 と 角度範囲 を設定します。
-
(オプション)ビジョン結果に把持位置姿勢の配列を含めるように設定します。
無効に設定した場合、Mech-Vizまたは経路計画ツールは、ワークライブラリに設定されたものに基づいて把持位置姿勢の配列を生成し、その配列内の把持位置姿勢を使って経路計画を行います。有効に設定した場合、Mech-Visionはワークライブラリの設定に基づいて把持位置姿勢の配列を出力し、Mech-Vizまたは経路計画ツールはその配列内の把持位置姿勢を使って経路計画を行います。
-
経路計画の前に把持位置姿勢の配列を出力したい場合は、このオプションをオンにしてください。
-
経路計画を行う際に把持位置姿勢の配列を生成したい場合は、このオプションをオフにしてください。
実際の状況に応じて、プロジェクトの要件やシステム性能に応じてこのオプションをオンにするかどうかを判断してください。例えば、配列内に含まれる把持位置姿勢が多い場合には、通常このオプションを有効にすることを推奨します。これにより、経路計画の前に不適切な把持点をフィルタリングし、最適化された把持位置姿勢の配列を出力することで、経路計画にかかる時間を短縮し、全体的な効率を向上させることができます。
-
円管の場合、設定された把持位置姿勢の配列の例は下図のようになります。
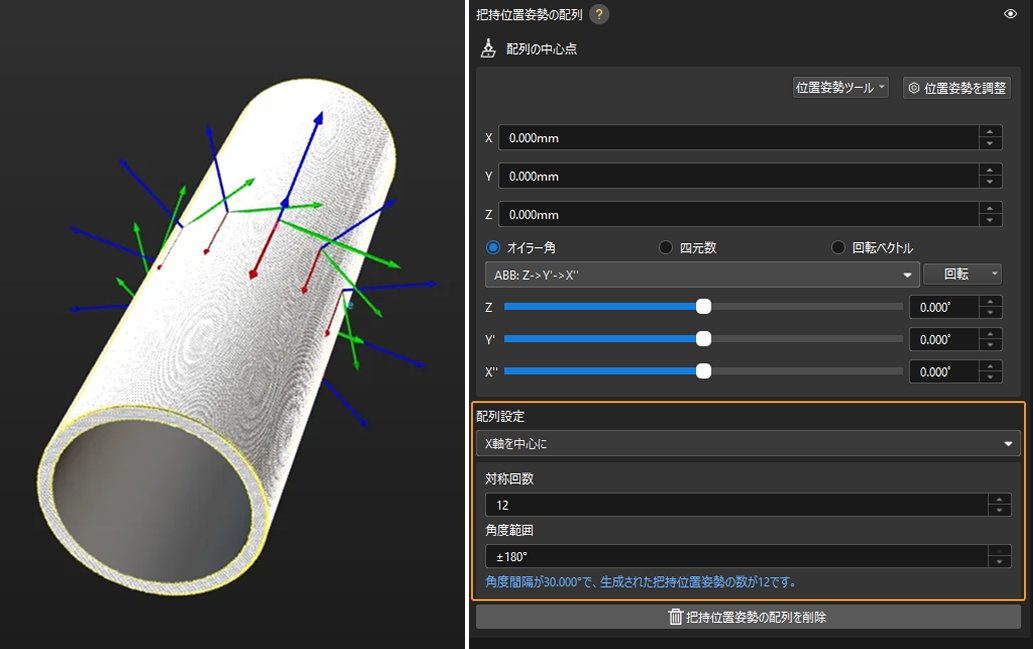
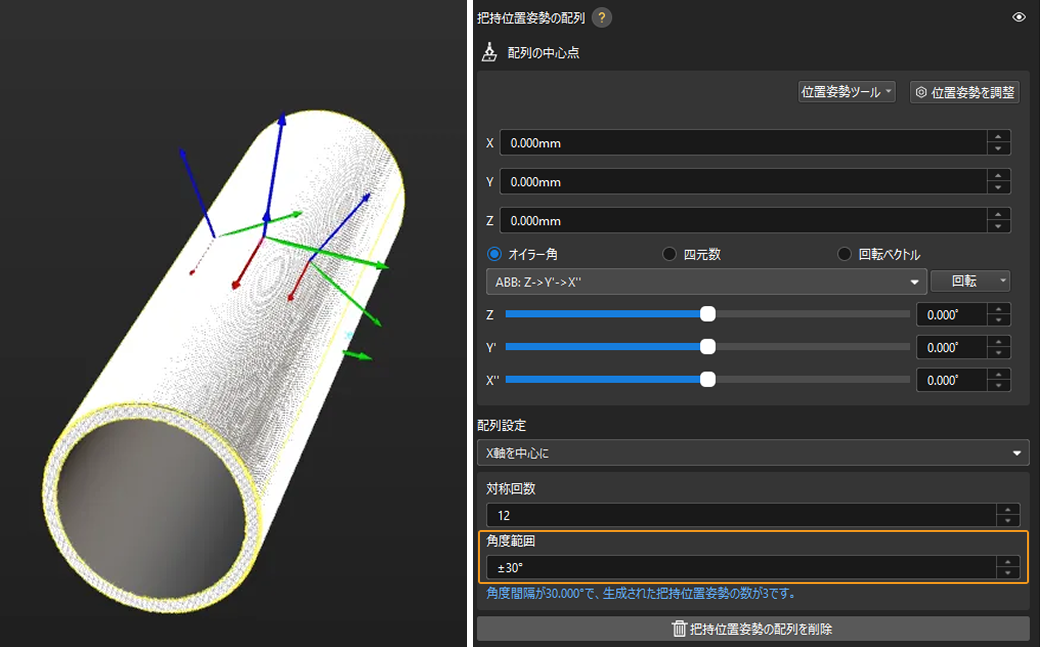
実際のアプリケーションでは、Z軸下向きの把持位置姿勢は無効となる可能性が高く、経路計画に影響を与えることがあります。そのため、把持位置姿勢の配列を設定する際は、角度範囲を小さく設定する必要があります。通常、範囲は±90°以内に設定することをお勧めします。下図に示すように、バラ積みされた円管に把持位置姿勢の配列を設定する際には、配列の角度範囲を±30°にすることで使用要件を満たしています。
把持設定を追加
把持効果をプレビュー
経路計画ツールまたはMech-Vizにロボットハンドを設定している場合、ワークライブラリ内でそれを有効にし、実際の把持時における把持位置姿勢とロボットハンドの位置関係をプレビューできます。これにより、設定した把持位置姿勢が合理的かどうかを事前に確認できます。詳細は以下の通りです。
-
経路計画ツール
-
Mech-Viz
-
ロボットハンドを追加します。
経路計画ツールで ロボットハンドを追加してTCPを設定 します。
-
ロボットハンドをプレビューして有効にします。
ロボットハンドを追加すると、その情報は自動的にワークライブラリのロボットハンドリストに更新されます。実際のニーズに応じて、リストからロボットハンドを選択し、可視化エリアで把持位置姿勢とロボットハンドの位置関係をプレビューできます(下図を参照)。また、選択したロボットハンドを実際の把持に使用することも可能です。
経路計画ツールでロボットハンドを変更した場合は、変更を保存した後にワークライブラリのロボットハンドリストを更新する必要があります。また、ワークライブラリ内で把持位置姿勢に対応するロボットハンドを有効化することは、経路計画を正常に実行するための必須条件です。 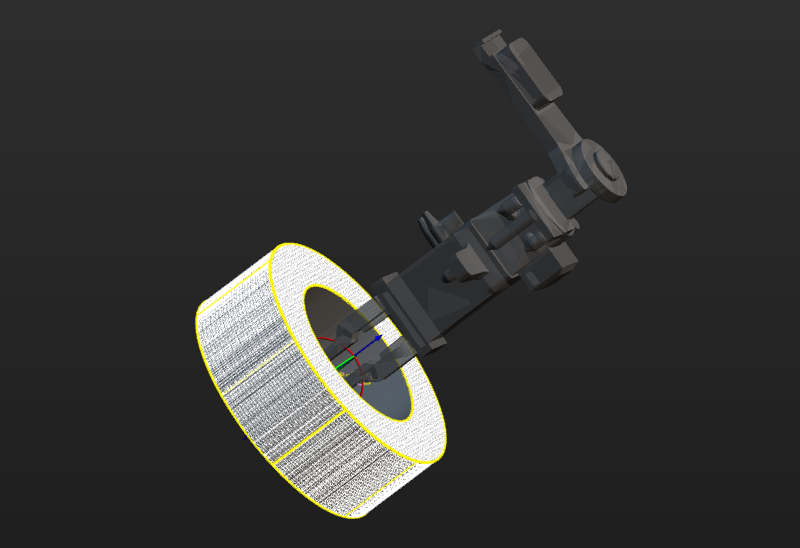
-
Mech-Vizプロジェクトが現在のソリューションに含まれていることを確認します。
ワークライブラリ内でMech-Vizからロボットハンド情報を取得するためには、Mech-Vizプロジェクトを現在のソリューションにエクスポート する必要があります。
-
ロボットハンドを追加します。
Mech-Vizで ロボットハンドを追加してTCPを設定 します。
-
ロボットハンドをプレビューして有効にします。
ロボットハンドを追加すると、その情報は自動的にワークライブラリのロボットハンドリストに更新されます。実際のニーズに応じて、リストからロボットハンドを選択し、可視化エリアで把持位置姿勢とロボットハンドの位置関係をプレビューできます(下図を参照)。また、選択したロボットハンドを実際の把持に使用することも可能です。
Mech-Vizでロボットハンドを変更した場合は、変更を保存した後にワークライブラリのロボットハンドリストを更新する必要があります。また、ワークライブラリ内で把持位置姿勢に対応するロボットハンドを有効化することは、Mech-Vizのシミュレーションを正常に実行するための必須条件です。
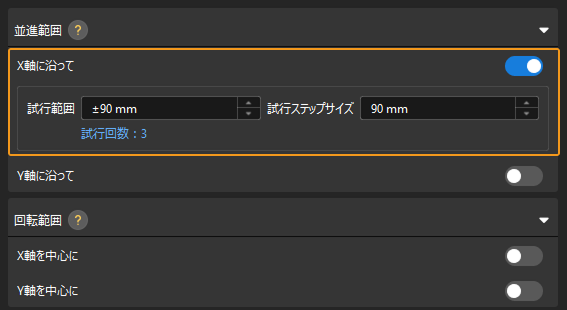
ロボットハンドの並進/回転範囲を設定
実際の把持時に、ロボットハンドが把持位置姿勢のある方向に位置や角度が変化してもワークを把持できるようにしたい場合は、ワークライブラリで 並進範囲 および 回転範囲 を設定できます。これにより、把持成功率をさらに向上させることが可能です。
例えば、円管の場合、X軸方向に沿って把持位置姿勢を並進させることができます。
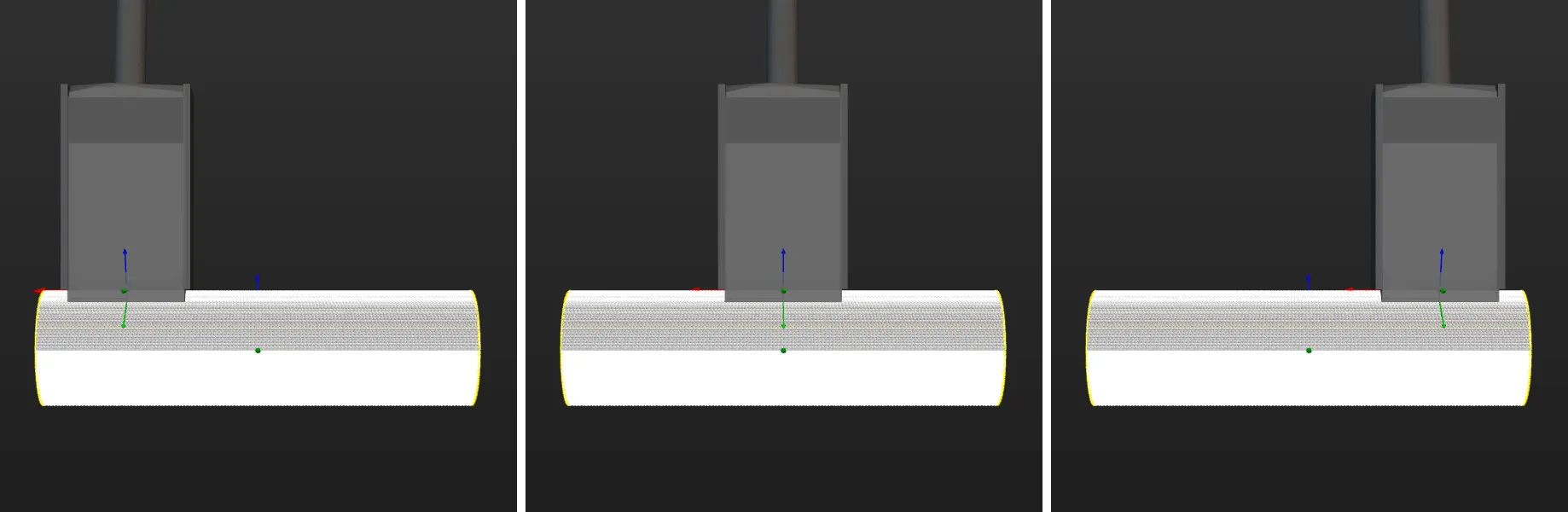
対応するワークライブラリの設定は下図のようになります。
把持位置姿勢の戦略選択を設定
実際のニーズに応じて、把持位置姿勢の選択戦略を設定できます。ソフトウェアはデフォルトで ロボットハンドの回転が最小 戦略を使用します。
-
ロボットハンドの回転が最小:この戦略を選択すると、ソフトウェアは把持および配置の過程において、ロボットハンドのZ軸回転角度が最小となる把持位置姿勢を優先的に使用します。この戦略により、ワークを把持した後にロボットハンドが不要な回転を行うことを回避し、ワークの落下リスクを低減できます。
-
ロボットハンドとビジョン位置姿勢との差が最小:この戦略を選択すると、ソフトウェアはワークの位置姿勢との偏差角度が最小となる把持位置姿勢を優先的に使用します。
-
ロボットハンドと点群の衝突が最小:この戦略を選択すると、ソフトウェアはロボットハンドとワークの点群との衝突体積が最小となる把持位置姿勢を優先的に使用します。
保存 をクリックして上記の設定を保存します。衝突モデルの設定が必要な場合は、次へ をクリックします。
衝突モデルを設定(オプション)
衝突モデルは、経路計画時に対象物が衝突するかどうかを検出するための3Dシミュレーションモデルです。実際の状況に応じて、以下の設定を行うことができます。
衝突モデルを設定
このツールは、使用中のワーク設定フローに基づいて、最適な衝突モデルの生成方式を自動的に推奨します。現在推奨されている衝突モデルの生成方式は、基本幾何立体を使用 です。ツールは作成した基本幾何立体に基づいて衝突モデルを生成し、その後に衝突検出を行います。この方式で生成された衝突モデルは精度が低いですが、衝突検出速度は速いです。
|
衝突モデルの生成方法が 基本幾何立体 に設定されている場合、Mech-Viz把持されている対象物と点群、未把持対象物の衝突検出 はサポートされていません。 |
把持されているワークの対称性を設定
対称性のタイプ を参照して 対称軸 を選択し、その後、対称回数と角度範囲 を設定します。
これで、衝突モデルの設定が完了しました。保存 をクリックすると、ワークが ソリューションフォルダ\resource\workobject_library パスに保存されます。これにより、後続のマッチング関連のステップで使用できるようになります。