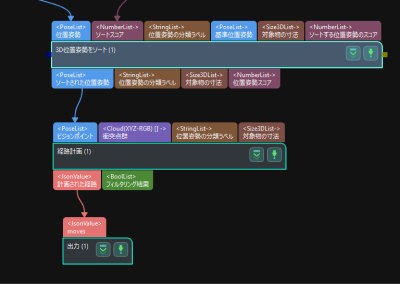
経路計画
機能
入力されたビジョンポイントを使用してロボット経路を計画し、計画に成功したロボット経路を出力します。
|
「経路計画」ステップ機能は Mech-Viz に関連します。このステップを使用するには、Mech-Viz をインストールし、ソフトウェアライセンスを取得 する必要があります。 |
|
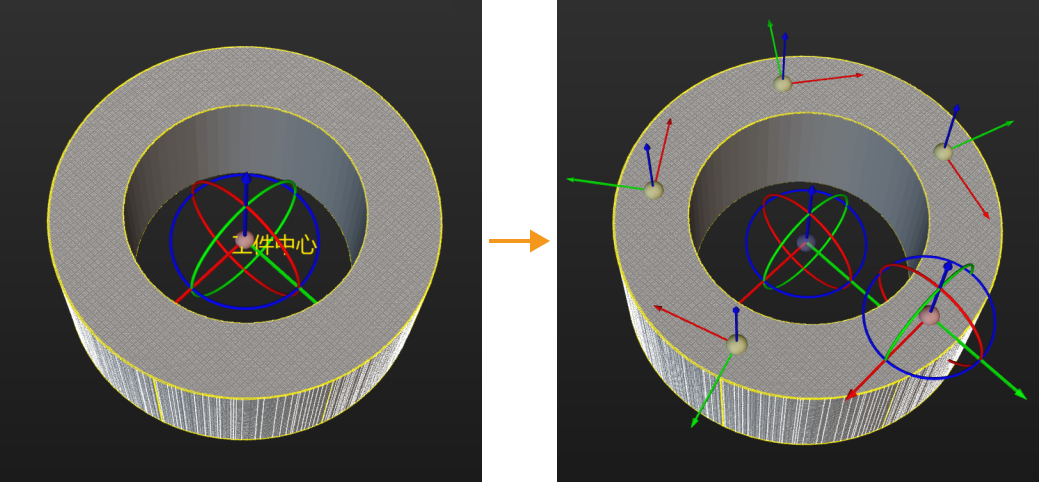
使用シーン
通常、標準インターフェースやAdapterの通信方式で、ビジョン目標点付近のロボット動作経路のみを計画する必要があるプロジェクトで使用されます。シーンを作成し、ビジョンポイントと点群を入力して衝突検出および経路計画を行い、最終的に衝突のないロボット動作経路を出力します。
このステップの前後のステップは以下の通りです。
-
前のステップ:位置姿勢調整と処理に関連するステップ。
-
後のステップ:出力 ステップ。出力タイプパラメータをロボット経路(把持型) に設定する必要があります。
入力と出力
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
把持位置姿勢 |
Pose[] |
ワークの把持位置姿勢リスト。 |
把持位置姿勢の情報 |
JsonValue |
把持点に関する情報。ワーク名、把持点名、把持点ラベルなどが含まれます。 |
衝突点群 |
PointCloud[] |
この入力ポートに入力された点群は、ロボットハンドとの衝突検出に使用されます。経路計画ツール内で点群衝突検出を有効にする必要があります。 |
把持位置姿勢のラベル |
String[] |
ワークライブラリ内のワーク把持点のラベル。通常、標準インターフェース通信時に上位システムとのラベル通信に使用されます。 |
ワーク寸法 |
Size3D[] |
ワークの寸法。 |
把持点オフセット |
Pose[] |
ワーク中心点に対する把持点のオフセット。 |
シーンの物体の名前 |
String[] |
シーンの物体の名前のリスト。リスト内の物体の寸法と位置姿勢が更新されます。 |
シーンの物体の寸法 |
Size3D[] |
シーンの物体の寸法のリスト。リスト順にシーンの物体の寸法が更新されます。 |
シーンの物体の位置姿勢 |
Pose[] |
シーンの物体の位置姿勢のリスト。リスト順にシーンの物体の位置姿勢が更新されます。 |
パラメータ説明
経路計画設定
| パラメータ | 説明 |
|---|---|
ワークフロー設定 |
パラメータ説明:経路計画設定ツール を開いてワークフローの関連設定を行い、設定済みのワークフローから1つを選択します。 |
シーンの物体を更新 |
パラメータ説明:有効にすると、このステップに シーンの物体の名前、シーンの物体の寸法 および シーンの物体の位置姿勢 ポートが追加されます。シーンの物体(コンテナなど)の位置姿勢と寸法を更新できます。
|
使用シーン
| パラメータ | 説明 |
|---|---|
シーンを選択 |
パラメータ説明:現在のソリューションの適用シーンを選択します。 オプション:3Dモデルマッチング(ワーク供給、位置決め・組立など)、デパレタイジングおよびその他 調整説明:
初期値:3Dモデルマッチング(ワーク供給、位置決め・組立など) |
データ変換方式 |
パラメータ説明:認識結果を把持に必要なデータ形式へ変換します。 オプション:対象物中心点に基づいて把持戦略を生成、把持位置姿勢に基づいて把持戦略を生成
初期値:対象物中心点に基づいて把持戦略を生成 |
点群モデル不要なワーク |
パラメータ説明:点群モデルを必要としないワークを選択します。このステップは、そのワークの把持関連情報を出力できます。適用シーンが 「デパレタイジングおよびその他」 の場合は、このパラメータを設定する必要があります。 |
衝突検出設定
| パラメータ | 説明 |
|---|---|
点群がカメラ座標系にある |
パラメータ説明:点群がカメラ座標系にある場合、このパラメータにチェックを入れる必要があります。チェックを入れると、点群がロボット座標系に変換されて経路計画設定ツールに送信されます。チェックを入れないと、点群が経路計画設定ツールに直接送信されます。
|
基本幾何立体以外のワークの点群を除去 |
パラメータ説明:チェックを入れると、Mech-Vision は基本幾何立体以外のワークの衝突モデルと重なる点群を除去し、点群が衝突検出に干渉するのを防ぎます。適用シーンが「3Dモデルマッチング(ワーク供給、位置決め・組立など)」の場合、このパラメータを設定する必要があります。
|
ワーク点群の検索半径 |
パラメータ説明:ワーク点群の任意の点を円の中心とし、検索半径内の点群は除去されます。このパラメータは、基本幾何立体以外のワークの点群を除去 にチェックを入れた場合に設定する必要があります。
|