各種シーンにおけるワーク認識
以下では、ワーク認識を適用した各種シーンについて説明します。
ワーク認識(ワーク供給シーン)
使用ガイド
-
ワークライブラリでワークを設定します。
ワークの種類に応じて、ワークライブラリ(把持型ワーク) のホームページから「点群モデルを作成せずに設定」以外の設定フローを選択し、ワークの点群モデルを作成します。
-
ビジョンプロジェクトを設定します。
-
3Dマッチング ステップまたは ワーク認識の設定ツール を使用してワークを認識します。
ワークの対称性や把持位置姿勢の数に応じて、ステップの出力を設定する必要があります。
-
把持位置姿勢が複数ある場合、把持位置姿勢のフィルタリングが必要となるため、ステップではワークの把持位置姿勢を出力する必要があります。
-
ワークに対称性がある場合、ワーク中心点の方向を調整する必要があるため、ステップではワーク中心点を出力する必要があります。
-
-
位置姿勢編集ツール を使用してワークの位置姿勢を調整します。
-
出力 ステップのパラメータを設定します。
パラメータ パラメータ値 出力タイプ
ビジョン結果(把持型)
シーンを選択
3Dモデルマッチング
データ変換方式
上記のbステップの出力と対応する設定を行います。
-
ワークの把持位置姿勢を出力した場合、「把持位置姿勢に基づいて把持戦略を生成」に設定します。
-
ワーク中心点を出力した場合、「対象物中心点に基づいて把持戦略を生成」に設定します。
-
-
-
プロジェクトを実行し、ワークの位置姿勢を出力します。
ワーク認識(ワーク供給シーン - パーテーションや供給容器あり)
適用シーン
3Dマッチングを使用してワークを認識すると同時に、平面点群の位置姿勢とサイズを計算 する方法でパーテーションやコンテナなどを認識する必要がある場合に適しています。
使用ガイド
-
ワークライブラリでワークを設定します。
-
ワークライブラリ(把持型ワーク) のホームページから「点群モデルを作成せずに設定」以外の設定フローを選択し、ワークの点群モデルを作成します。
-
点群モデルを作成せずに設定 設定フローを選択し、パーテーションの把持に必要なワーク情報を設定します。
-
-
ビジョンプロジェクトを設定します。
-
複数プロジェクトの場合
ワーク認識とパーテーション認識の両方のプロジェクトが含まれる場合、パーテーション認識プロジェクトは以下のように設定する必要があります。
ステップ パラメータ パラメータ値 出力
シーンを選択
デパレタイジングおよびその他
点群モデル不要なワーク
パーテーションに対応するワーク名
-
単一プロジェクトの場合
ワーク認識とパーテーション認識を1つのプロジェクト内で同時に行う場合は、以下のフローに従ってプロジェクトを構築する必要があります。
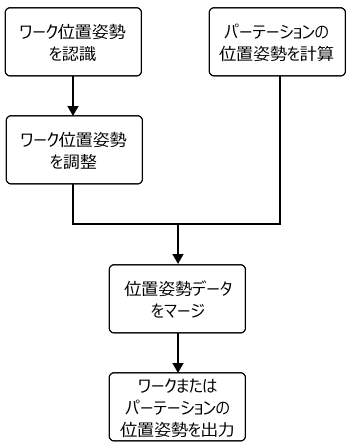
作成したプロジェクトは下図のようになります。
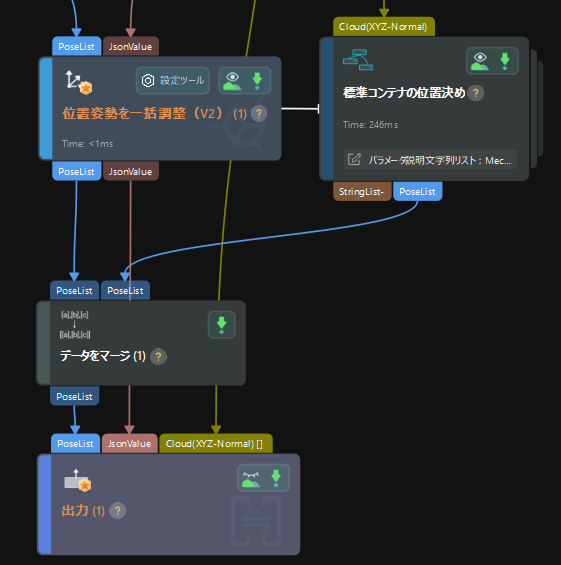
「ワークの把持戦略を生成」ステップには、ワークライブラリの「点群モデルを作成せずに設定」のフローで保存されたワークの名前が入力されるため、このステップには把持位置姿勢を直接入力する必要があり、ステップで出力される把持位置姿勢は入力された把持位置姿勢と一致します。
プロジェクト作成後、以下の設定を行う必要があります。
ステップ パラメータ 調整説明 「3Dマッチング」ステップまたはワーク認識の設定ツール
信頼度しきい値
誤認識や見逃し認識を避けるために、適切な信頼度しきい値を設定する必要があります。
初めに初期値で設定し、実行結果を確認することを推奨します。誤認識が発生した場合は値を上げ、見逃しが発生した場合は値を下げて調整してください。位置姿勢を一括調整(V2)
出力がない場合に制御フローをトリガー
チェックを入れます。
出力がない場合に実行を続ける
チェックを外します。
出力
出力タイプ
ビジョン結果(把持型)
シーンを選択
3Dモデルマッチング
-
-
プロジェクトを実行し、ワークの位置姿勢を出力します。
ワーク認識(デパレタイジングシーン)
適用シーン
3Dマッチングを使用してワークを認識すると同時に、平面点群の位置姿勢とサイズを計算 する方法でパーテーションやコンテナなどを認識する必要がある場合に適しています。
使用ガイド
-
ワークライブラリでワークを設定します。
ワークの種類に応じて、ワークライブラリ のホームページで「点群モデルを作成せずに設定」設定フローを選択し、段ボール箱および麻袋デパレタイジングに必要なワーク情報を設定します。
-
ビジョンプロジェクトを設定します。
-
3Dマッチング以外の方法でワークを認識します。
-
出力 ステップのパラメータを設定します。
パラメータ パラメータ値 出力タイプ
ビジョン結果(把持型)
シーンを選択
デパレタイジングおよびその他
その他の入力
ワーク寸法を出力したい場合は、「その他のポート」で対応するパラメータにチェックを入れてください。チェックを入れると、「出力」ステップに「ワークの寸法」などの入力ポートが追加されます。
-
-
プロジェクトを実行し、ワークの位置姿勢を出力します。
ワーク認識(任意ワーク把持)
適用シーン
任意ワークの把持シーンにおいて、任意ワーク把持(V2) 方法を使用してワークを認識し、3Dマッチング方法は使用しません。
使用ガイド
-
ワークライブラリでワークを設定します。
ワークの種類に応じて、ワークライブラリ のホームページで「点群モデルを作成せずに設定」設定フローを選択し、把持に必要なワーク情報を設定します。
-
ビジョンプロジェクトを設定します。
-
任意ワーク把持(V2)でワークを認識します。
-
出力 ステップのパラメータを設定します。
パラメータ パラメータ値 出力タイプ
ビジョン結果(把持型)
シーンを選択
デパレタイジングおよびその他
その他の入力
ワーク寸法を出力したい場合は、「その他のポート」で対応するパラメータにチェックを入れてください。チェックを入れると、「出力」ステップに「ワークの寸法」などの入力ポートが追加されます。
-
-
プロジェクトを実行し、ワークの位置姿勢を出力します。
ワーク認識(外部点群モデルを使用)
適用シーン
動的に点群モデルを生成する必要があるシーンに適しています。このようなシーンでは、ワークの種類が多岐にわたり、ワークライブラリで個別に点群モデルを作成することが困難であり、かつワークが基本幾何立体である場合が該当します。例えば、スプを使用して点群モデルを生成する場合や、STLモデルから点群モデルを生成する場合が含まれます。
使用ガイド
このシーンでは、「3Dマッチング」ステップの「外部モデル」機能を使用し、「対象物のモデルを作成」ステップで生成された点群モデルを読み込みます。その後、ワークライブラリを使用して点群モデル以外のワーク情報を生成します。詳細な操作手順は以下の通りです。
-
ビジョンプロジェクトを設定します。
-
3Dマッチング ステップを追加し、ステップパラメータを設定します。
パラメータ パラメータ値 パラメータ調整レベル
詳細または上級
入力タイプ
外部モデル
-
点群モデルを生成するステップを追加し、接続します。
プロジェクト内に点群モデルを生成するためのステップを追加・接続します。例として、ブレーキディスクの点群モデルを動的に生成する場合、「対象物のモデルを作成」ステップを使用してブレーキディスクの寸法に基づいて点群モデルを作成できます。
-
「3Dマッチング」ステップに外部点群モデルを入力します。
-
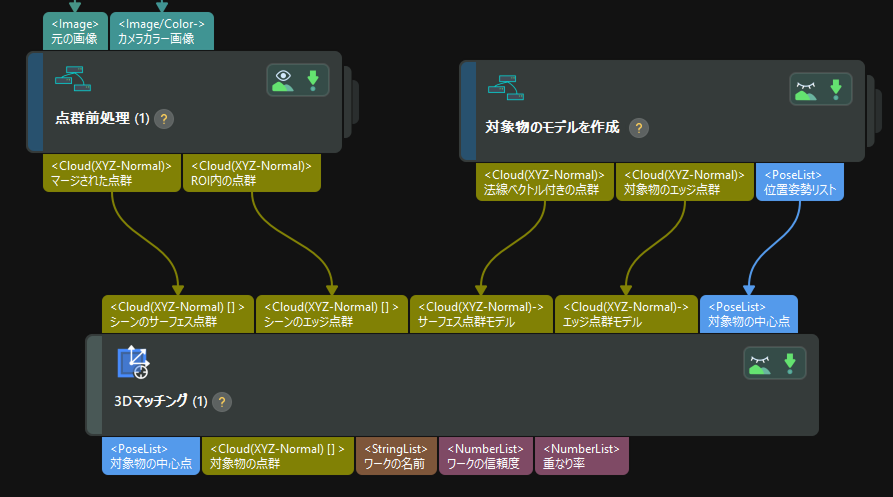
処理済みのシーン点群(サーフェス)およびシーン点群(エッジ)を、それぞれ「3Dマッチング」ステップの1番、2番の入力ポートに接続します。
-
生成したワークのサーフェス点群モデル、エッジ点群モデル、ワーク中心点を、それぞれ「3Dマッチング」ステップの3番、4番、5番の入力ポートに接続します。
-
-
出力 ステップのパラメータを設定します。
パラメータ パラメータ値 出力タイプ
ビジョン結果(把持型)
シーンを選択
デパレタイジングおよびその他
-
-
ワークライブラリを使用して、点群モデル以外のワーク情報を生成します。
ワークの種類に応じて、ワークライブラリのホームページで 点群モデルを作成せずに設定 設定フローを選択し、ワークを設定して、点群モデル以外のワーク情報を取得します。
-
プロジェクトを実行し、ワークの位置姿勢を出力します。