ロボット通信設定
ビジョンシステムのハードウェア設置 では、ビジョンシステムとロボットシステムのハードウェアを統合します。ロボット通信設定は、両者の通信を統合し、ビジョンシステムとロボット側がデータを正確かつリアルタイムにやり取りできるようにするプロセスです。
通常、ロボット通信設定では、Mech-Mindが提供する通信プログラムと設定ファイルをロボットシステムに読み込み、それに対応する通信設定を完了する必要があります。
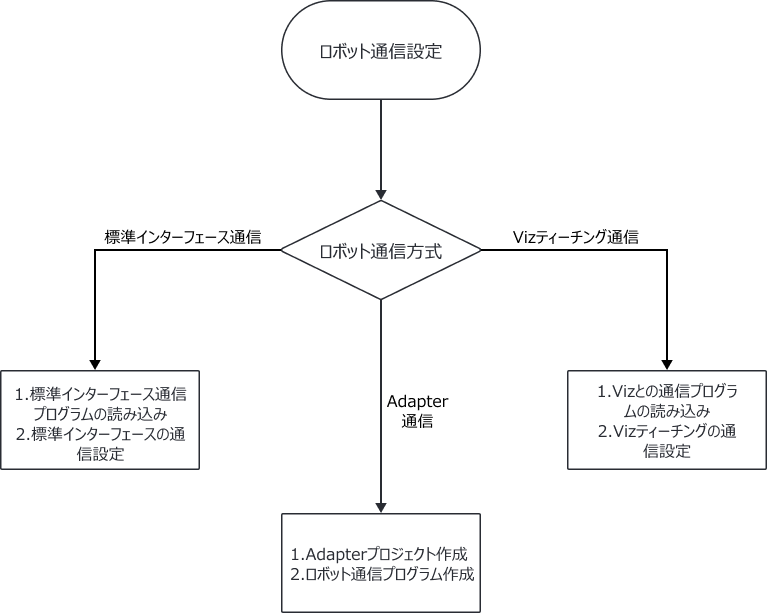
この段階で設定が必要な項目は、ビジョンソリューションの設計段階で選択したロボット通信方式によって異なります。
-
標準インターフェース通信を選択した場合、この段階では標準インターフェースプログラムと設定ファイルをロボットシステムに読み込み、標準インターフェース通信に関連する設定を完了する必要があります。
設定する際は、 標準インターフェース通信対応状況一覧表 が参考になります。
-
Vizティーチング通信を選択した場合、この段階ではVizとの通信プログラムと設定ファイルをロボットシステムに読み込み、Vizティーチング通信に関連する設定を完了する必要があります。
設定する際は、 Vizティーチング通信対応状況一覧表 が参考になります。
-
Adapter通信を選択した場合、この段階ではビジョンシステムのためにAdapterプロジェクトを作成し、ロボット側の対応する通信プログラムを作成する必要があります。
Adapterはカスタマイズされた通信方式であるため、高いプログラミング能力が求められます。Adapter通信に関する詳細は、 Adapter通信 をご参照ください。