シミュレーション失敗時の衝突原因のトラブルシューティング
実際のワークを把持できる場合でも、Mech-Vizソフトウェアが衝突を検出し、把持できない場合は、計画履歴を参照して衝突情報を確認する必要があります。以下では、シミュレーションで衝突原因をトラブルシューティングする方法を説明します。
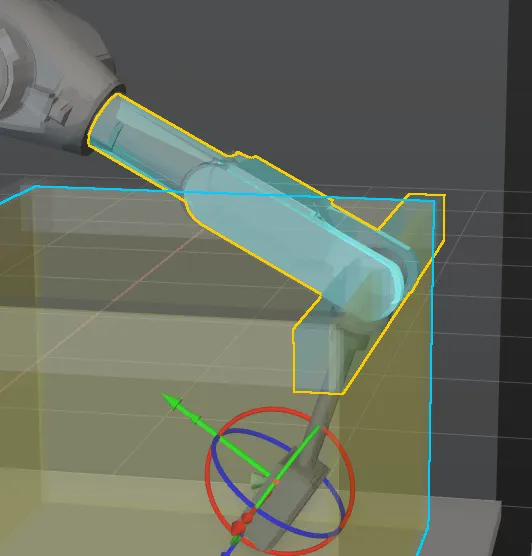
ロボットハンドと点群の衝突

計画履歴に ロボットハンドは点群と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
ノイズとの衝突 |
Mech-Visionプロジェクトで 点群クラスタリング、点のフィルタリング、3D ROI内の点群を抽出 などのステップを使用してノイズを除去します。 |
把持位置姿勢またはワークの位置姿勢が正しくない |
Mech-Visionプロジェクトの認識結果が正確であるか確認します。 |
設定された衝突検出しきい値が小さすぎる |
現場の条件が許せば、Mech-Vizの 衝突検出パネル で 点群衝突検出 の下の 衝突検出しきい値 を大きくします。 |
把持位置姿勢の設定が適切でない |
ワークライブラリの 把持位置姿勢を設定 手順で、把持設定 でロボットハンドを有効にし、ロボットハンドと把持位置姿勢の相対位置関係を確認して、把持位置姿勢の設定が適切であることを確認し、ロボットハンドとワークの間に衝突が発生しないようにします。 |
ロボットハンドモデル、TCP、把持位置姿勢が一致しない |
ロボットハンドモデル作成時に、安全範囲が大きすぎる、TCP位置が高すぎる、または把持点位置が低すぎると、点群衝突の過検出が発生する可能性があります。そのため、これらの三項目は正確である必要があります。ティーチング方法で把持位置姿勢を設定する場合、ロボットハンドモデルのサイズと取り付け角度が実際のロボットハンドと一致していることを確認してください。グリッパモデルを作成する際は、実際の形状を正確に再現するため、できるだけ細部まで作成する必要があります。 |
ワークがバラ積みされているため、ロボットハンドが把持時に他のワークと軽微な衝突が発生する |
このような衝突を無視することが許容されます。Mech-Vizの 衝突検出パネル で、状況に応じて よくある問題と解決法 の 問題2 の右にあるスイッチをオンにし、解決法を確認します。衝突を無視した場合、安全リスクが伴う可能性があることに注意してください。 |
ロボットハンドと把持していないワークとの衝突

計画履歴に ロボットハンドは未把持対象物と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
考えられる原因 |
解決法
|
把持位置姿勢またはワークの位置姿勢が正しくない |
Mech-Visionプロジェクトの認識結果が正確であるか確認します。 |
設定された衝突検出しきい値が小さすぎる |
現場の条件が許せば、Mech-Vizの 衝突検出パネル で 点群衝突検出 の下の 衝突検出しきい値 を大きくします。 |
把持位置姿勢の設定が適切でない |
ワークライブラリの 把持位置姿勢を設定 手順で、把持設定 でロボットハンドを有効にし、ロボットハンドと把持位置姿勢の相対位置関係を確認して、把持位置姿勢の設定が適切であることを確認し、ロボットハンドとワークの間に衝突が発生しないようにします。 |
ロボットハンドモデル、TCP、把持位置姿勢が一致しない |
ロボットハンドモデル作成時に、安全範囲が大きすぎる、TCP位置が高すぎる、または把持点位置が低すぎると、点群衝突の過検出が発生する可能性があります。そのため、これらの三項目は正確である必要があります。ティーチング方法で把持位置姿勢を設定する場合、ロボットハンドモデルのサイズと取り付け角度が実際のロボットハンドと一致していることを確認してください。グリッパモデルを作成する際は、実際の形状を正確に再現するため、できるだけ細部まで作成する必要があります。 |
ワークがバラ積みされているため、ロボットハンドが把持時に他のワークと軽微な衝突が発生する |
このような衝突を無視することが許容されます。Mech-Vizの 衝突検出パネル で、状況に応じて よくある問題と解決法 の 問題2 の右にあるスイッチをオンにし、解決法を確認します。衝突を無視した場合、安全リスクが伴う可能性があることに注意してください。 |
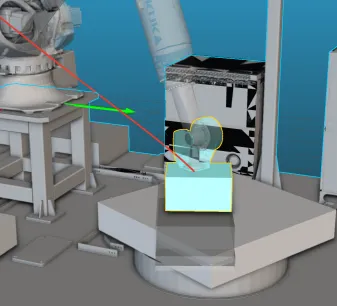
ロボットハンドとシーンの物体の衝突

計画履歴に ロボットハンドはシーンの物体と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
中間点の位置が適切でない |
実際のシーンに応じて中間点を手動で調整します。 |
シーンの物体の安全範囲が大きすぎる |
一般的に、把持位置と配置位置の近くでは、シーンの物体の安全範囲を約5mmに設定できます。具体的な状況に応じて、他の位置にあるシーンオの物体の安全範囲を適切に増やします。箱が大きく変形している場合は、衝突検出に使用する点群の形式 を 点群柱 に設定することができます。 |
ロボットハンドと配置されたワークとの衝突

計画履歴に ロボットハンドは配置済み対象物と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
配置位置が適切でない |
実際のシーンに応じて配置位置を手動で調整します。 |
ロボットハンドがワークを把持している間、ロボットハンドとワークが互いに埋め込まれているかどうかにかかわらず、衝突とは見なされません。しかし、ワークが配置されると、「把持しているワーク」は「配置済みワーク」となります。ロボットハンドとワークが互いに埋め込まれている場合、ロボットハンドと「配置済みワーク」と衝突したと判定されます。 |
把持/配置 が 配置 に設定されたステップ後の移動ステップを選択し、移動ステップの共通パラメータ で 配置された対象物との衝突を検出しない にチェックを入れます。 |
ロボットリンクと把持していないワークとの衝突

計画履歴に ロボットリンクは未把持対象物と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
中間点の位置が適切でない |
実際のシーンに応じて中間点を手動で調整します。 |
把持位置姿勢の設定が適切でない |
ワークライブラリの 把持位置姿勢を設定 手順で、把持設定 でロボットハンドを有効にし、ロボットハンドと把持位置姿勢の相対位置関係を確認して、把持位置姿勢の設定が適切であることを確認し、ロボットハンドとワークの間に衝突が発生しないようにします。 |
ロボットリンクと点群との衝突

計画履歴に ロボットリンクは点群と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
ノイズとの衝突 |
Mech-Visionプロジェクトで 点群クラスタリング、点のフィルタリング、3D ROI内の点群を抽出 などのステップを使用してノイズを除去します。 |
中間点の位置が適切でない |
実際のシーンに応じて中間点を手動で調整します。 |
設定された衝突検出しきい値が小さすぎる |
現場の条件が許せば、Mech-Vizの 衝突検出パネル で 点群衝突検出 の下の 衝突検出しきい値 を大きくします。 |
ロボットリンクとシーンの物体との衝突

計画履歴に ロボットリンクはシーンの物体と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
ETHシーンで、ビジョン処理による移動 ステップがワークフローの中で不適切な位置にあり、カメラがロボットを撮影している |
ワークフロー内の ビジョン処理による移動 ステップの位置を調整します。 |
現場のレイアウトが不適切で、ロボットが箱と衝突している |
現場のレイアウトを調整し、ロボットが把持中に箱と衝突しないようにします。 |
シーンの物体の安全範囲が大きすぎる |
一般的に、把持位置と配置位置の近くでは、シーンの物体の安全範囲を約5mmに設定できます。具体的な状況に応じて、他の位置にあるシーンオの物体の安全範囲を適切に増やします。箱が大きく変形している場合は、衝突検出に使用する点群の形式 を 点群柱 に設定することができます。 |
ロボットリンクと配置されたワークとの衝突

計画履歴に ロボットリンクは配置済み対象物と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
配置位置が適切でない |
実際のシーンに応じて配置位置を手動で調整します。ワークに対称性がある場合は、ワークライブラリで対称性を設定して、より多くの配置方法を提供します。 |
把持しているワークと把持していないワークとの衝突

計画履歴に 把持している対象物は未把持対象物と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
衝突検出パラメータが適切に設定されていない |
Mech-Vizの衝突検出機能パネルで、対象物衝突検出 の 把持されている対象物と点群、把持していない対象物の衝突検出 が有効になっているか確認します。ワーク間の絡まりや擦れ合いが把持に影響する場合に限って使用することを推奨します。軽微な衝突が把持にあまり影響しない場合は、このオプションを無効にすることを推奨します。 |
ワークがバラ積みされており、ワーク点群が互いに埋め込まれている |
Mech-Visionプロジェクトの認識結果を確認し、ワーク点群が相互に引っかかることや埋め込まれないようにします。 |
このような衝突を無視することが許容されます。Mech-Vizの 衝突検出パネル で、状況に応じて よくある問題と解決法 の 問題2 の右にあるスイッチをオンにし、解決法を確認します。衝突を無視した場合、安全リスクが伴う可能性があることに注意してください。 |
|
現場の条件が許せば、Mech-Vizの 衝突検出パネル で 対象物衝突検出 の下の 衝突検出しきい値 を大きくします。 |
把持しているワークと点群との衝突

計画履歴に 把持している対象物は点群と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
衝突検出パラメータが適切に設定されていない |
Mech-Vizの衝突検出機能パネルで、対象物衝突検出 の 把持されている対象物と点群、把持していない対象物の衝突検出 が有効になっているか確認します。ワーク間の絡まりや擦れ合いが把持に影響する場合に限って使用することを推奨します。軽微な衝突が把持にあまり影響しない場合は、このオプションを無効にすることを推奨します。 |
ノイズとの衝突 |
Mech-Visionプロジェクトで 点群クラスタリング、点のフィルタリング、3D ROI内の点群を抽出 などのステップを使用してノイズを除去します。 |
Mech-Visionプロジェクトの 出力 ステップの ワークの点群を除去 パラメータにチェックを入れるか、ワーク点群の検索半径 パラメータ値を大きくしてノイズを減少させます。 |
|
このような衝突を無視することが許容されます。Mech-Vizの 衝突検出パネル で、状況に応じて よくある問題と解決法 の 問題2 の右にあるスイッチをオンにし、解決法を確認します。衝突を無視した場合、安全リスクが伴う可能性があることに注意してください。 |
|
現場の条件が許せば、Mech-Vizの 衝突検出パネル で 対象物衝突検出 の下の 衝突検出しきい値 を大きくします。 |
把持しているワークとシーンの物体との衝突

計画履歴に 把持している対象物はシーンの物体と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
シーンの物体の安全範囲が大きすぎる |
一般的に、把持位置と配置位置の近くでは、シーンの物体の安全範囲を約5mmに設定できます。具体的な状況に応じて、他の位置にあるシーンオの物体の安全範囲を適切に増やします。箱が大きく変形している場合は、衝突検出に使用する点群の形式 を 点群柱 に設定することができます。 |
認識されたワークの位置姿勢が不正確で、ワークモデルがシーンモデルに埋め込まれている |
ロボットがワークを持って移動する準備をしているときに発生する小さな衝突は、作業に大きな影響を与えないため、無視しても問題ありません。Mech-Vizの 衝突検出パネル で、状況に応じて よくある問題と解決法 の 問題2 の右にあるスイッチをオンにし、解決法を確認します。 |
中間点の位置が適切でない |
実際のシーンに応じて中間点を手動で調整し、ロボットが把持後に障害物からできるだけ早く離れるようにします。 |
把持しているワークと配置されたワークとの衝突

計画履歴に 把持している対象物は配置済み対象物と衝突 が表示される場合、考えられる原因と解決法は下表に示されています。
| 考えられる原因 | 解決法 |
|---|---|
配置位置が適切でない |
実際のシーンに応じて配置位置を手動で調整します。 |
配置位置に既にワークが存在すると検出された |
現場のロボットがワークをコンベアなどの装置に配置する必要がある場合、配置されるとワークは移動され、実際には衝突が発生しません。この場合、把持と配置設定 が 配置 に設定された移動ステップの後に、リセット ステップを追加して、既に配置されたワークの衝突モデルをクリアします。 |