把持と配置を実行
把持は、3Dロボットビジョンアプリケーションの導入の最終目標です。この段階では、ロボットがビジョンシステムによって正確に把持できるように、把持作業のワークフローを構築する必要があります。
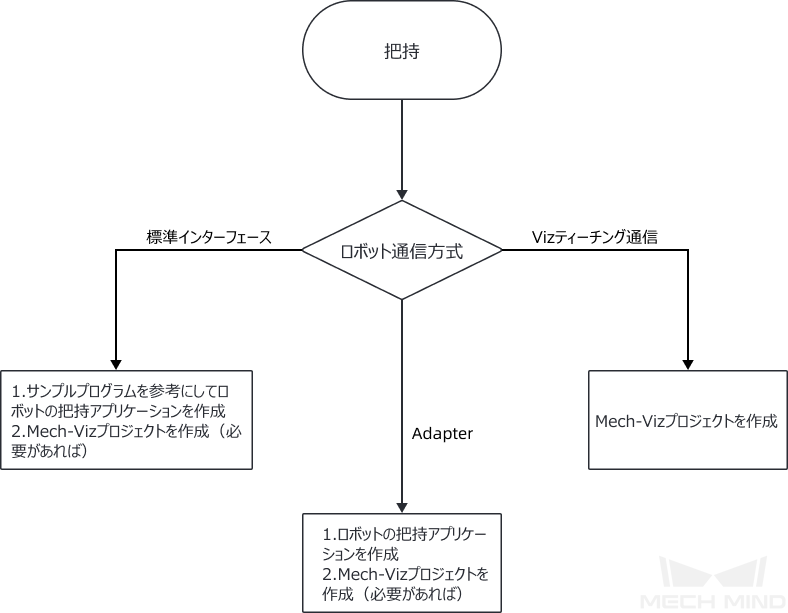
ロボットの把持作業のワークフローの構築方法は、選択したロボット通信方式によって異なります。
| 高い把持精度が求められるプロジェクトの場合は、導入する際には 特集:把持精度の向上 を参照して関連設定を行ってください。 |
ロボットの把持作業のワークフローを構築(標準インターフェース通信)
標準インターフェース通信方式を使用する場合、ロボット側でロボットの把持アプリケーションを作成し、ビジョンシステムによるロボットの把持作業を実現することが可能です。Mech-Mindは、対応済みのロボットに対して標準インターフェースのサンプルプログラムを提供しており、これを参考にして把持アプリケーションを作成することができます。
標準インターフェース通信を使用する場合、作成したプロジェクトやビジョンシステムの出力結果に応じて、標準インターフェースとビジョンシステムの連携方法は以下の3つに分類されます。
以下では、これらの連携方法について詳しく説明します。
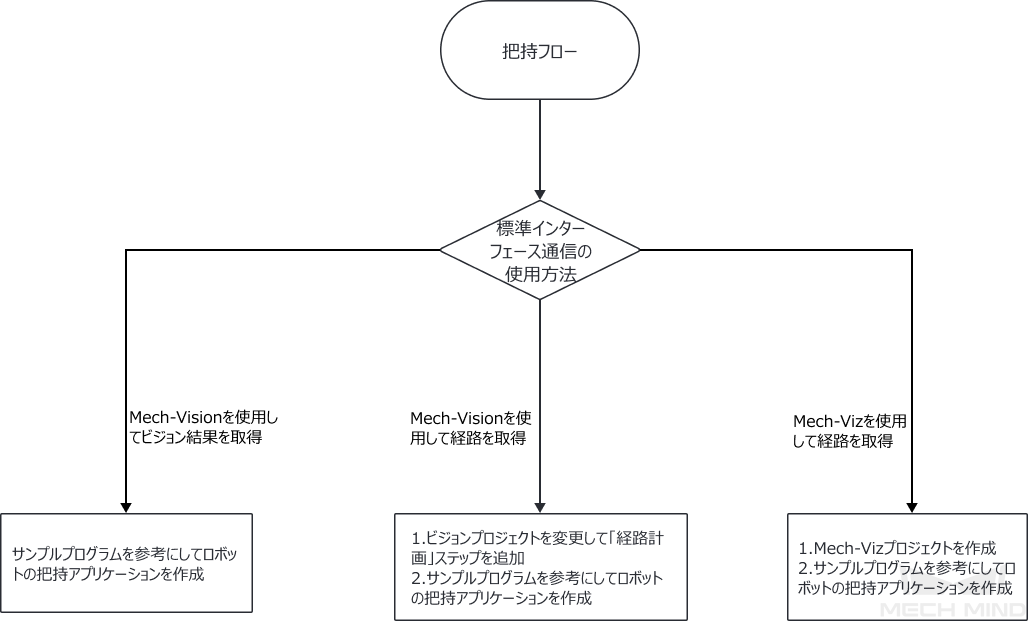
Mech-Visionを使用してビジョン結果を取得
この方法では、ロボットまたはPLCは標準インターフェースコマンドを使用してMech-Visionプロジェクトをトリガーし、Mech-Visionが出力したビジョン結果を取得します。
必要なプロジェクト |
Mech-Visionプロジェクト |
|---|---|
ビジョンシステムの出力結果 |
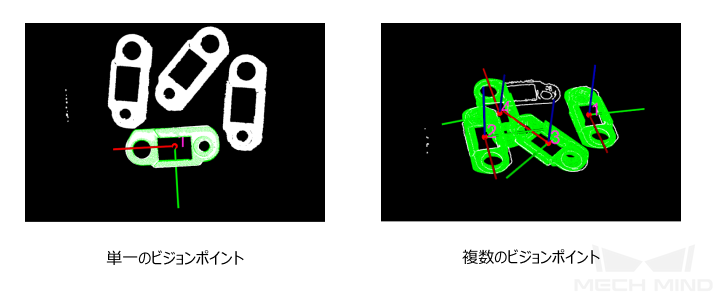
ビジョン結果。1つ以上のビジョンポイントを含み、各ビジョンポイントには位置姿勢、ワーク情報などのデータが含まれます。
|
| ビジョン結果は、Mech-Visionプロジェクトの 出力 ステップから出力されます。「出力」ステップの ポートタイプ パラメータを 事前定義済み(ビジョン結果) または カスタム に設定する必要があります。 |
この方法の一般的なフローは以下の通りです。
-
ロボットまたはPLCは標準インターフェースコマンドを使用してMech-Visionプロジェクトをトリガーします。
-
ビジョンシステムがMech-Visionプロジェクトを実行し、ビジョン結果を出力します。
-
ロボットまたはPLCは標準インターフェースコマンドを使用してビジョン結果を取得します。
-
ロボットはビジョン結果による把持を行います。
上記のフローを実現するために、ロボットまたはPLCプログラムを作成する必要があります。Mech-Mindは、対応済みのロボットまたはPLCに対して数多くのサンプルプログラムを提供しています。そのうち、最初のサンプルプログラムは上記のフローに従って実装されています。さらに、他の拡張機能を実装するために他のサンプルも参考にできます。ロボットプログラムまたはPLCプロジェクトを作成するには、標準インターフェース通信 をご参照ください。
Mech-Vizを使用して計画された経路を取得
この方法では、ロボットまたはPLCは標準インターフェースコマンドを使用してMech-Vizプロジェクトをトリガーし、Mech-Vizが出力した計画された経路を取得します。
必要なプロジェクト |
Mech-VizとMech-Visionプロジェクト |
|---|---|
ビジョンシステムの出力結果 |
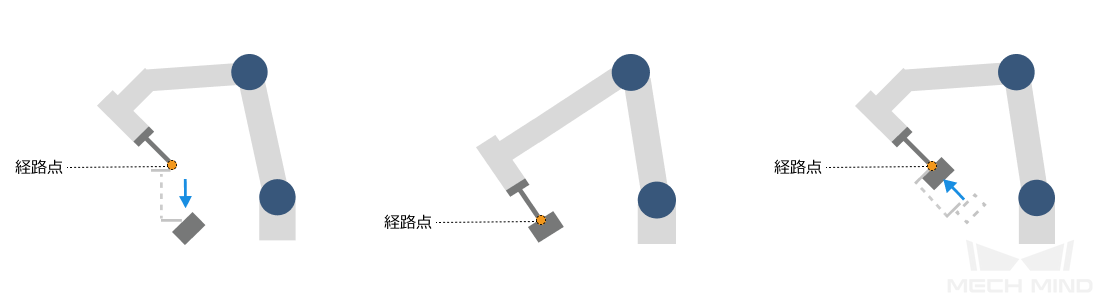
計画された経路。一連の経路点からなり、各経路点にはロボットの位置姿勢、ワーク情報、移動タイプなどのデータが含まれます。
|
|
この方法の一般的なフローは以下の通りです。
-
ロボットまたはPLCは、標準のインタフェースコマンドを使用してMech-Vizプロジェクトをトリガーします。
-
ビジョンシステムがMech-Vizプロジェクトを実行し、計画された経路を出力します。Mech-Vizプロジェクトの実行中、Mech-Vizはビジョン結果を取得するためにMech-Visionプロジェクトを呼び出し、ビジョン結果に基づいてロボットの移動経路を計画します。
-
ロボットまたはPLCは、標準のインタフェースコマンドを使用して計画された経路を取得します。
-
ロボットは計画された経路に従って把持を行います。
上記のフローを実現するために、ロボットまたはPLCプログラムを作成する必要があります。Mech-Mindは、対応済みのロボットまたはPLCに対して数多くのサンプルプログラムを提供しています。そのうち、2番目のサンプルプログラムは上記のフローに従って実装されています。さらに、他の拡張機能を実装するために他のサンプルも参考にできます。ロボットプログラムまたはPLCプロジェクトを作成するには、標準インターフェース通信 をご参照ください。
Mech-Visionを使用して計画された経路を取得
この方法では、ロボットまたはPLCは標準インターフェースコマンドを使用してMech-Visionプロジェクトをトリガーし、Mech-Visionが出力した計画された経路を取得します。
必要なプロジェクト |
Mech-Visionプロジェクト |
|---|---|
ビジョンシステムの出力結果 |
計画された経路。一連の経路点からなり、各経路点にはロボットの位置姿勢、ワーク情報、移動タイプなどのデータが含まれます。
|
この方法の一般的なフローは以下の通りです。
-
ロボットまたはPLCは標準インターフェースコマンドを使用してMech-Visionプロジェクトをトリガーします。
-
ビジョンシステムがMech-Visionプロジェクトを実行し、計画された経路を出力します。
-
ロボットまたはPLCは、標準のインタフェースコマンドを使用して計画された経路を取得します。
-
ロボットは計画された経路に従って把持を行います。
上記のフローを実現するために、ロボットまたはPLCのプログラムを作成する必要があります。Mech-Mindは、対応済みのロボットやPLCに対して数多くのサンプルプログラムを提供しています。そのうち、3番目のサンプルプログラムは上記のフローに従って実装されています。さらに、他の拡張機能を実装するために他のサンプルも参考にできます。ロボットプログラムまたはPLCプロジェクトを作成するには、標準インターフェース通信 をご参照ください。
ロボットの把持作業のワークフローを構築(Vizティーチング通信)
Vizティーチング通信を使用した場合、Mech-Vizでロボットの把持作業のワークフロー(Mech-Vizプロジェクト)をグラフィカルに構築できます。
Mech-Vizワークフローを構築するには、Mech-Viz ワークフローの構築 をご参照ください。