3D ロボットビジョンソリューションのカリキュラム 
カリキュラム
|
 システムの構成
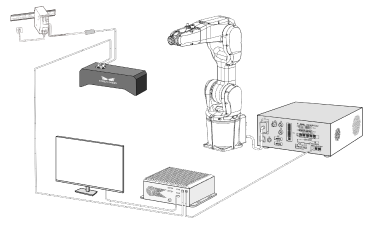
システムの構成
3D ロボットビジョンソリューションは、Mech-Mindのセンサー検知、ビジョン処理、経路計画などの技術を統合した包括的なソリューションであり、ロボットが複雑で未知または動的な環境で直面する課題に対処することを目的としています。
|
導入に必要なソフトウェアとその対応バージョンについては、3D ロボットビジョンソリューションの組合せ可能なソフトウェアの推奨バージョン をご参照ください。
ビジョンシステムがサポートしているロボットについては、サポートされているロボット型番 をご参照ください。
各バージョンの Mech-Vision が対応しているカメラ型番については、各バージョンの Mech-Vision の対応カメラ型番一覧 をご参照ください。
 クイックスタート
クイックスタート
初心者や新規ユーザー向けに、入門ガイドを提供しています。入門ガイドを読むことで、Mech-Mind の 3D ビジョソリューションを理解し、最初の 3D ビジョンアプリケーションを構築する方法を習得できます。
入門ガイド:ビジョンシステムによる整列して並べられたワークの供給 |
|
入門ガイド:ビジョンシステムによるバラ積みされたワークの供給 |
|
入門ガイド:ビジョンシステムによる単載デパレタイズ |
|
入門ガイド:ビジョンシステムによる位置決め・組立て |
|

 実際のアプリケーションの導入
実際のアプリケーションの導入
実際のアプリケーションの導入手順、操作ガイド、経験共有について説明します。3D ロボットビジョンソリューションの概要を理解した後、この部分を読むことで、実際の導入に必要な知識と手順を習得できます。
以下に、一般的な導入手順を示します。


カメラや IPC などのハードウェアを実際の動作環境に組み込み、ビジョンシステムが正常に動作するように設置します。
設置手順は、カメラの取り付け方法によって異なります。詳細については、ビジョンシステムのハードウェア設置 をご参照ください。
ハードウェアを統合した後、ビジョンシステムとロボット間でデータを正確かつリアルタイムにやり取りできるよう通信設定を行います。
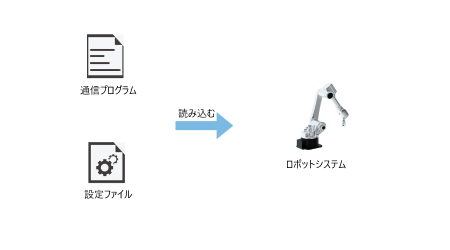
通常は、Mech-Mind が提供する通信プログラムと設定ファイルをロボットシステムに読み込み、対応する通信設定を完了する必要があります。詳細については、ロボット通信設定 をご参照ください。
カメラ座標系とロボット座標系の対応関係を求めるのキャリブレーションを実施します。
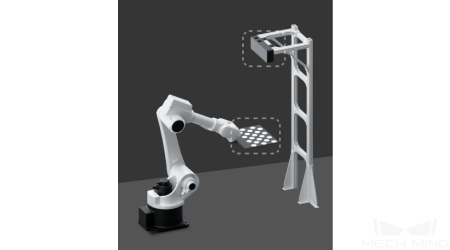
Mech-Mind ソフトウェアには、標準化されたキャリブレーションツールが組み込まれており、異なるロボットタイプや取り付け方法にも対応可能です。詳細については、ハンド・アイ・キャリブレーション をご参照ください。

対象物の認識・位置決めを実現するために、ビジョンプロジェクトを設定します。これは 3D ビジョンアプリケーションの導入において最も重要な作業です。
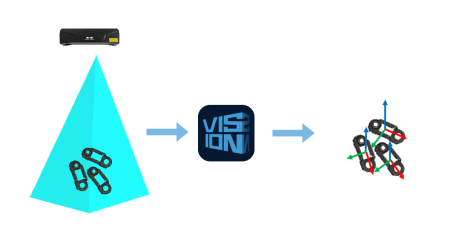
詳細については、ビジョンプロジェクトの設定 をご参照ください。
3D ビジョンシステムによるロボットの把持は、3D ビジョンアプリケーション導入の最終目標です。ロボットがワークを正確に把持・配置できるよう、対応するワークフローを構築します。

使用する通信方式によって異なるため、ワークフローの構築は異なる方法で行われます。詳細については、把持作業 をご参照ください。
さらに異なるアプリケーションについては、3D ロボットビジョンソリューションの導入事例 をご参照ください。
 トラブルシューティングと保守運用
トラブルシューティングと保守運用
プロジェクトの導入や生産プロセスの運用中に不具合や異常が発生した場合は、以下の内容を参照してトラブルシューティングを行い、必要に応じてサポートを受けることができます。