衝突検出パラメータを設定
ロボット把持中に衝突を防止するため、Mech-Vizは異なる種類の物体間の衝突を柔軟に検出できる機能を備えています。
シーン、ロボットハンド、およびワークの衝突モデルを要件に従って追加した後、衝突検出パネル でそれぞれの衝突検出を有効にすることができます。
以下では、一般的なシーンでの衝突検出パラメータの設定について説明します。
デパレタイジング
推奨設定
-
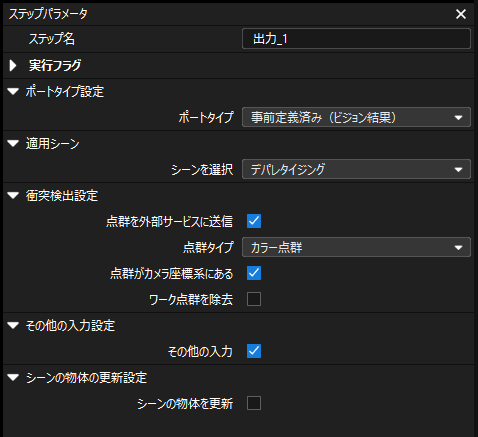
Mech-Visionの 出力 ステップパラメータで、適用シーンを デパレタイジング に設定し、点群を外部サービスに送信、点群がカメラ座標系にある および その他の入力 にチェックを入れます。
-
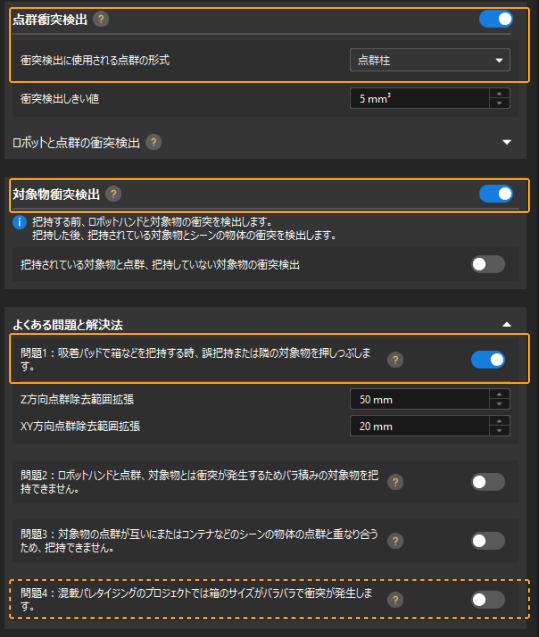
Mech-Vizの衝突検出パネルで 点群衝突検出 を有効にし、衝突検出に使用される点群の形式 を 点群柱 に設定します。
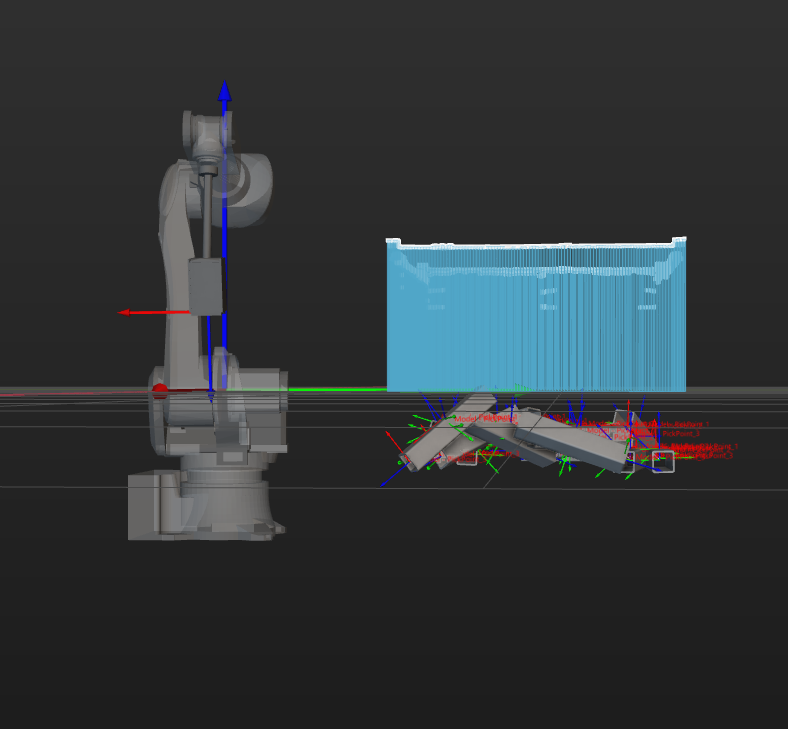
衝突検出に使用される点群の形式 が 点群柱 の場合、Mech-Vizは箱の上面の点群(始点)を使用し、ワールド座標系のZ軸の負方向に仮想空間の地面(終点)まで延伸して、点群衝突モデルを生成します。点群柱を使用することで、吸盤で箱を把持する際に他の箱との衝突を回避できます(特に側面に吸着する場合)。
衝突検出に使用される点群の形式 の詳細については、こちら をご参照ください。
デフォルトでは、仮想空間のワールド座標系の原点とロボット座標系の原点は重なっています。ロボット座標系の原点が台座の下ではなく、ロボットの1軸に位置し、地面もロボットの1軸の平面に位置する場合、点群柱によって形成される衝突モデルの高さが不足します。この場合は、プロジェクトリソースツリーで 地面 を右クリックし、地面の高さ を調整して、実際の地面の位置に移動させます。
-
Mech-Vizの衝突検出機能パネルで、対象物衝突検出 を有効にし、把持されている対象物と点群、把持していない対象物の衝突検出 をデフォルトで無効にします。
後続の動作で把持されている箱と他のシーンの物体との衝突を検出します。
-
問題1 の右にあるスイッチをオンにします。パラメータ設定の詳細については、よくある問題と解決法 をご参照ください。
-
混載パレタイジングの場合、問題3 の右にあるスイッチをオンにして、箱の衝突モデルの下に伸ばす高さを追加し、厚さが追加されたモデルを使用して衝突検出を行います。
バラ積みピッキング
推奨設定
-
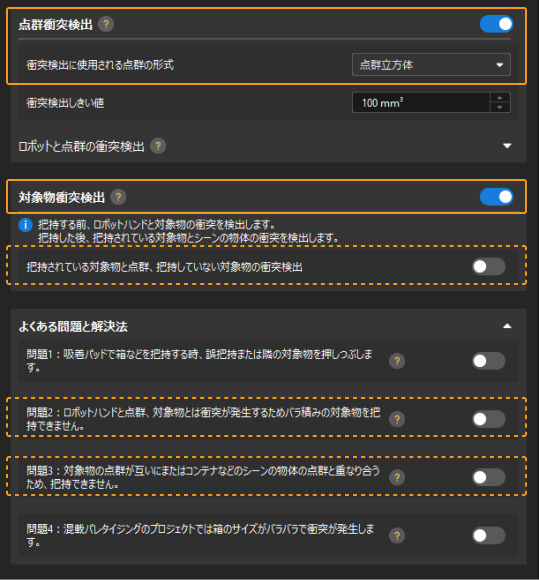
Mech-Vizの衝突検出パネルで 点群衝突検出 を有効にし、衝突検出に使用される点群の形式 を 点群立方体 に設定します。
点群衝突検出により、ロボットハンドと実際のワークの点群衝突を回避します。
-
Mech-Vizの衝突検出パネルで 対象物衝突検出 を有効にします。把持されている対象物と把持していない対象物の間の衝突を許さない場合は、把持されている対象物と点群、把持していない対象物の衝突検出 を有効にします。
後続の動作で把持されている対象物と他のシーンの物体との衝突を検出します。
-
以下のいずれかの状況に該当する場合は、よくある問題と解決法 の 問題2 の右にあるスイッチをオンにしてください。
-
ロボットハンドがワークを把持する際に、軽微な衝突を許容できる場合。
-
ワークが実際に把持可能であるが、ワークの点群が互いに重なり合っていたり、コンテナなどのシーン内の物体に埋まっているため、ソフトウェアが衝突を検出し、経路計画が失敗する場合。このシーンでは、把持前および把持後にそれぞれ 衝突を検出しない経路の長さ を設定する必要がある場合、パラメータ分割 をクリックしてください。
重大な衝突を防ぐため、検出しない経路をあんまり長くしないでください。
-