点のフィルタリング

パラメータ説明
このステップでは、点群内の点をフィルタリングするための2つの方法が提供されています。
-
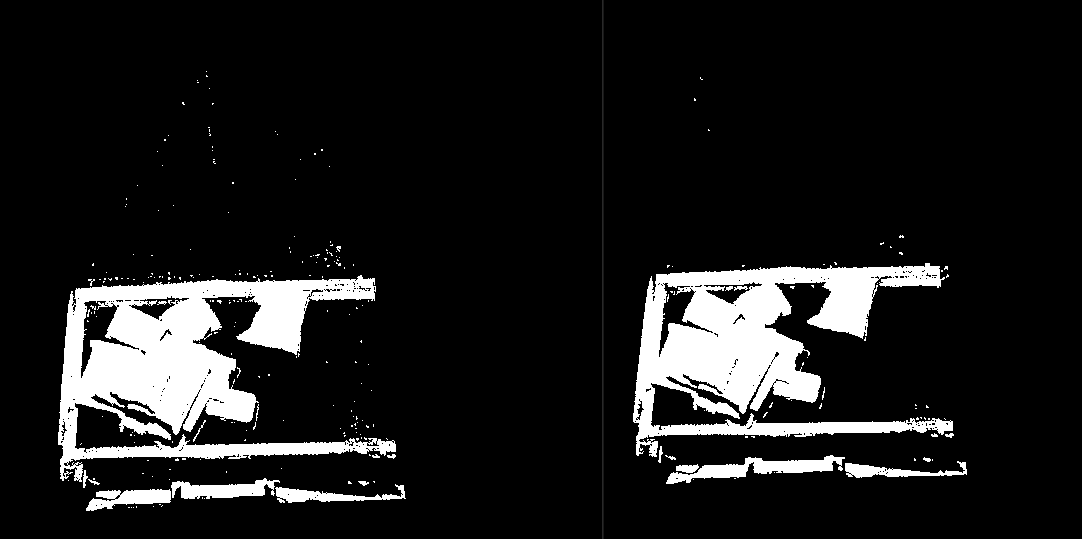
StatisticalOutlierFilter:統計的外れ値フィルター。指定されたパラメータに基づいて、範囲外の点を除去します。下図に示すように、点群に明らかな外れ値が存在する場合に使用を推奨します。
-
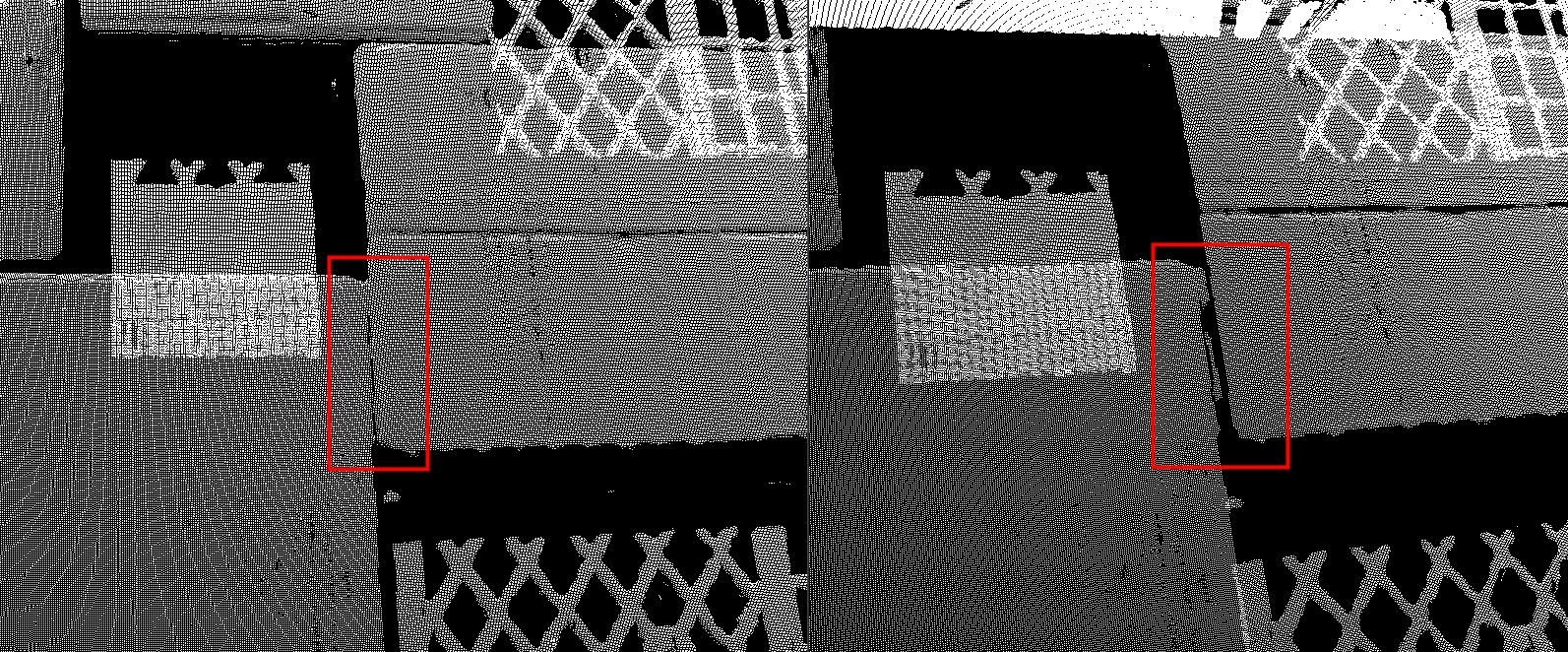
NormalsFilter:法線ベクトルフィルター。指定された基準方向に対し、点群内の各点との角度を計算し、範囲外の点を除去します。下図の赤枠に示すように、点群を階層化し、付着を防ぎたい場合に使用を推奨します。
以下では、上記2つの方法に関連するパラメータについて説明します。
StatisticalOutlierFilter
| パラメータ | 説明 | ||
|---|---|---|---|
最近隣接点の数 |
パラメータ説明:このパラメータは、各検索時に近傍点の数を指定するために使用されます。この値が大きいほど、平均距離の計算に使用される近傍点が増え、フィルタリング効果が強くなりますが、点群の細部が過度に除去される可能性があります。逆に、この値が小さすぎると、フィルタリングが不十分になる可能性があります。
|
||
標準偏差乗数 |
パラメータ説明:このパラメータは、外れ値を判定するためのしきい値を設定するために使用されます。この値を小さくすると、フィルタリング条件が厳しくなり、より多くの点が除去されます。逆に、この値を大きくすると、フィルタリング条件が緩くなり、より多くの点が残ります。 初期値:2.0000 調整アドバイス:初期値のまま使用することを推奨します。
|
NormalsFilter
基準方向設定
| パラメータ | 説明 |
|---|---|
ロボットのZ軸を使用 |
パラメータ説明:このパラメータは、カメラ座標系内のロボットのZ軸を基準方向として使用するかどうかを決定するために使用されます。このパラメータにチェックを入れると、基準方向X/Y/Z値 は無効になります。
|
基準方向のX値/Y値/Z値 |
調整説明:このパラメータは、法線ベクトルフィルターの基準軸を設定するために使用されます。X、Y、Zの3つのパラメータで方向ベクトルを構成し、基準軸の方向を決定します。ロボットのZ軸を使用 にチェックを入れた場合、この3つの値は無効になり、ロボットのZ軸が基準方向として使用されます。
|