2D位置姿勢を3D位置姿勢に変換(正投影に基づく)
使用シーン
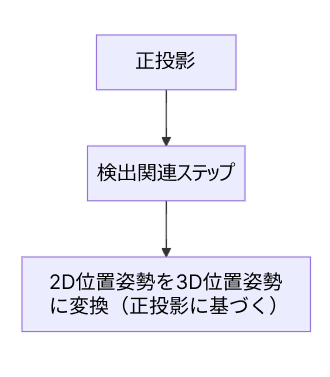
主に計測シーンで使用され、2D 画像内の位置姿勢を 3D 位置姿勢へ変換します。2D 画像は 正投影 ステップから取得されます。通常、このステップの前には正投影および検出関連のステップが接続されます。
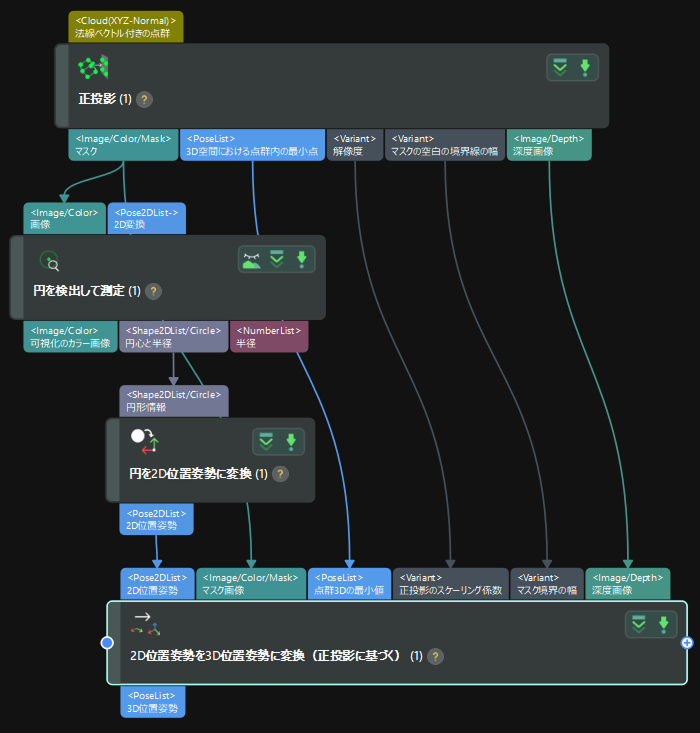
実際のプロジェクト用途においては、このステップの接続方法は以下の例をご参照ください。
主に計測シーンで使用され、2D 画像内の位置姿勢を 3D 位置姿勢へ変換します。2D 画像は 正投影 ステップから取得されます。通常、このステップの前には正投影および検出関連のステップが接続されます。
実際のプロジェクト用途においては、このステップの接続方法は以下の例をご参照ください。