TCP
以下では、TCPの通信設定について説明します。その前に、ロボットを選択 し、通信設定画面に入っていることを確認します。
-
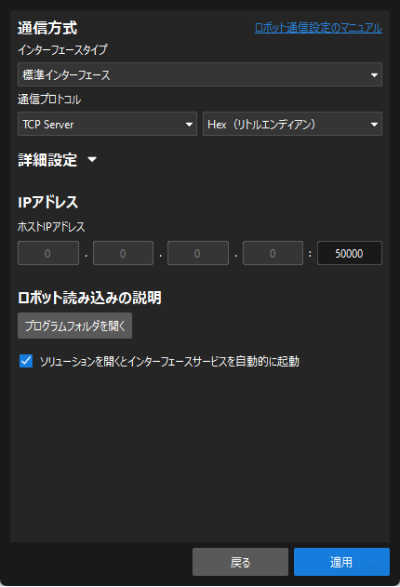
通信方式 では、インターフェースサービスのタイプを 標準インターフェース に、通信プロトコルを TCP Server に設定します。通信プロトコルの形式は、下表に従って選択します。
ロボットタイプ 通信プロトコル ABB
HEX(リトルエンディアン)
FANUC
HEX(ビッグエンディアン)
KUKA
HEX(リトルエンディアン)
Yaskawa
ASCII
Kawasaki
ASCII
UR
ASCII
TM
ASCII
ELITE
ASCII
JAKA
ASCII
ROKAE
ASCII
その他
ユーザーはロボット側の通信プログラムを作成する必要があるので、ロボットが対応しているHEX、ASCIIに応じてプロトコル形式を決定することができます。
-
IPアドレス でホストポート番号を設定します。
ホストポート番号を50000以上に設定することを推奨します。
-
(オプション)詳細設定 では、実際の状況に応じて以下のパラメータを設定してください。
-
一度に送信する位置姿勢の最大数:「Mech-Visionプロジェクトを実行」コマンドを使用する際、このパラメータを使用してビジョンシステムが一度に送信する位置姿勢の最大数を設定できます。ここでの最大数の上限は30です。
-
Mech-Vizデータ取得タイムアウト(秒):「Mech-Vizプロジェクトを実行」コマンドを使用する際、Mech-Vizがここで設定されたタイムアウト時間内に処理結果を返さない場合、タイムアウトエラーステータスコードが返されます。
-
Mech-Visionデータ取得タイムアウト(秒):「Mech-Visionプロジェクトを実行」コマンドを使用する際、Mech-Visionがここで設定されたタイムアウト時間内に処理結果を返さない場合、タイムアウトエラーステータスコードが返されます。
-
撮影完了後、「1102:トリガー成功」を返す: EIHシーンでこのパラメータにチェックを入れると、ビジョンシステムはカメラ撮影が完了後に「1102:トリガ成功」を返します。これにより、ロボットはMech-Visionプロジェクトの実行が完了するのを待たずに移動を開始でき、サイクルタイムが短縮されます。このパラメータにチェックを入れない場合、ロボットはMech-Visionプロジェクトの実行が完了するまで移動できません。
このパラメータにチェックを入れると、下に 撮影完了待ちタイムアウト パラメータが表示されます。カメラの撮影時間が長い場合は、ここでタイムアウト時間を適切に増やすことができます。 -
プロパティ設定:クリックすると、roperty_config.txt ファイルが表示されます。「Mech-Vizのステップパラメータを読み取る」または「Mech-Vizのステップパラメータを設定」コマンドを使用する際には、このファイルを使用してステップ番号やステップパラメータを指定する必要があります。使用方法については、Mech-Vizステップパラメータを読み取る と Mech-Vizステップパラメータを設定 コマンドをご参照ください。
-
リセット: 上記の設定項目(プロパティ設定を除く)を初期値にリセットします。
-
-
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れます。チェックを入れると、次回ソリューションを開く時に インターフェースサービスを起動 する必要はありません。
-
適用 をクリックします。
-
インターフェースサービスを起動 します。
選択したロボットに応じて、標準インターフェースの通信設定 を行います。