仮想空間
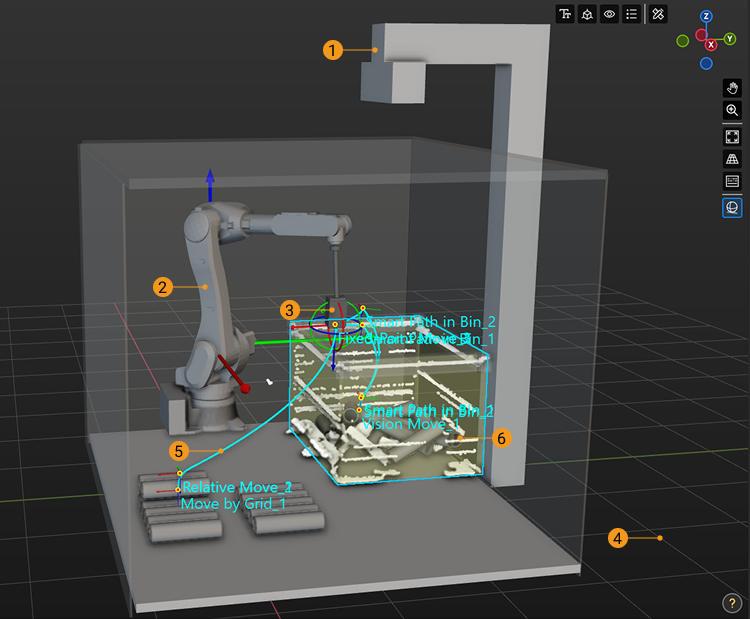
仮想区間では、シーンの物体とロボットハンド、対象物モデル、ロボットの運動経路、把持位置姿勢、衝突などが表示されます。また、ここでシーンの物のモデルをドラッグすることもできます。
番号 |
説明 |
1 |
シーンの物体 |
2 |
ロボット |
3 |
ロボットハンド |
4 |
地面 |
5 |
運動経路 |
ロボット実機を制御する時も、仮想ロボットの運動経路をシミュレートする時も、これからロボットが走行する経路が仮想空間に表示される
|
|
6 |
ビジョン処理の結果 |
ビジョンサービスによって取得した結果が仮想空間に表示される
|
概要
番号 |
説明 |
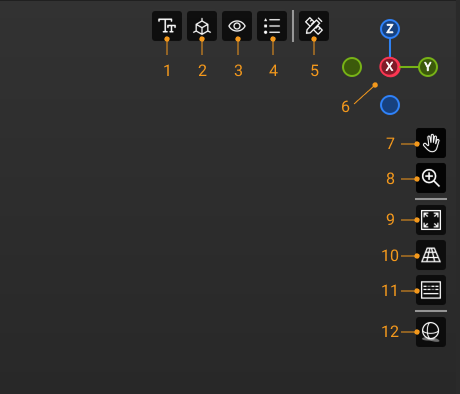
1 |
クリックするとフォントサイズ・座標軸の長さ設定パネルが表示される |
2 |
クリックすると座標系の可視性設定パネルが表示される |
3 |
クリックするとビジョン処理の結果の内容可視性設定パネルが表示される |
4 |
クリックするとビジョン処理による位置姿勢の表現色凡例設定パネルが表示される異なる色で表示される位置姿勢の状態については、位置姿勢の状態をお読みください |
5 |
クリックすると測定モードに切り替える。詳細は測定モードをお読みください |
6 |
視点の方向を表示します。 |
いずれかの軸(X、Y、Z、-X、-Y、-Z)をクリックすると視点をこの軸に合わせる。左ボタンを押したままドラッグすると視点を回転できる |
|
7 |
視点を並進 |
このアイコン(または「Shift」+ マウスホイール)を押したままドラッグして視点を並進できる |
|
8 |
拡大・縮小 |
このアイコンを押したまま前方にドラッグ(または手前にホイールを前方回転)して画面を拡大、押したまま後方にドラッグ(または手前にホイールを後方回転)して画面を縮小する |
|
9 |
自動調整 |
10 |
透視図/正投影図の切り替え |
11 |
押されたキーボードとマウスボタンを表示 |
クリックすると押されたキーとマウスボタンがウィンドウの右下にハイライト表示され、再度クリックすると非表示になる |
|
12 |
クリックすると、3D モデルの影が表示され、立体感が高まる |