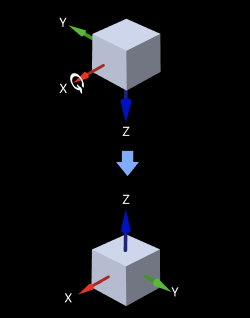
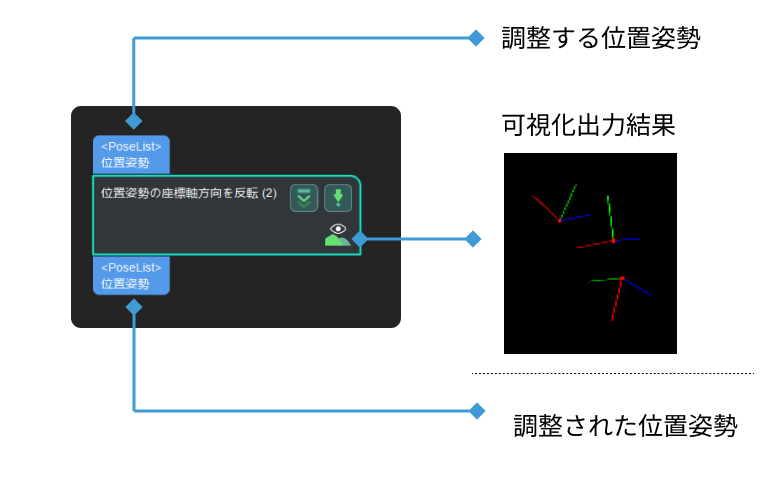
位置姿勢の座標軸方向を反転
パラメータ説明
可視化設定
| パラメータ | 説明 | ||
|---|---|---|---|
位置姿勢表示の設定 |
初期値:出力位置姿勢のみを表示。
|
||
反転する軸 |
初期値:Z
|
||
方向のタイプ |
初期値:負方向。
|
||
回転の基準軸 |
初期値:X オプション:X、Y、Z 調整説明:どの軸を中心に回転するかを選択します。
|
| パラメータ | 説明 | ||
|---|---|---|---|
位置姿勢表示の設定 |
初期値:出力位置姿勢のみを表示。
|
||
反転する軸 |
初期値:Z
|
||
方向のタイプ |
初期値:負方向。
|
||
回転の基準軸 |
初期値:X オプション:X、Y、Z 調整説明:どの軸を中心に回転するかを選択します。
|
