Mech-Viz の使用方法
Mech-Viz を使用して衝突が発生しない安全な経路を計画してロボットの把持をガイドする方法を簡単に説明していきます。
現場では、Mech-Viz の使用の流れは、6つの段階に分けられます。以下のようです。
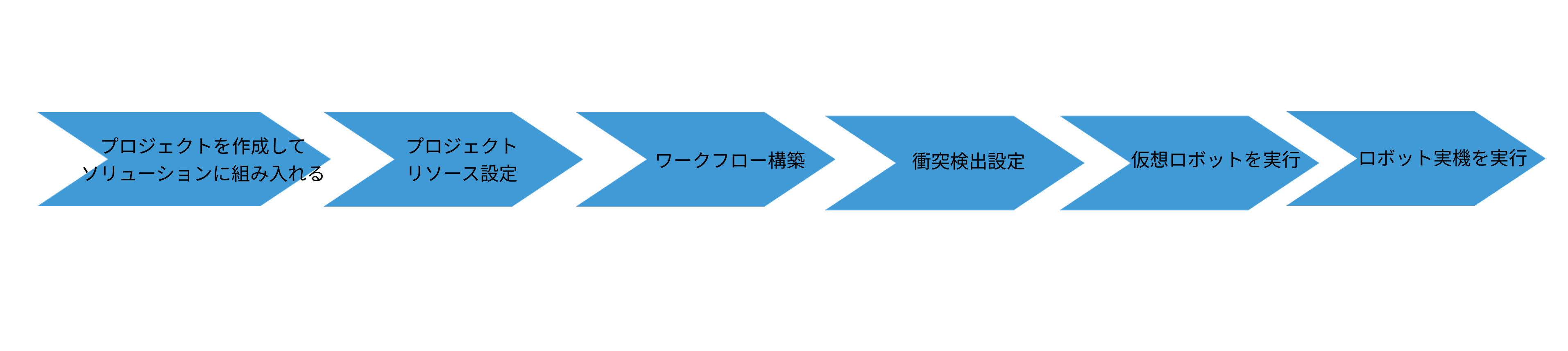
プロジェクトを作成してソリューションに組み入れる
ソリューションとは、ビジョンソリューションを実現するために必要なロボットとの通信、ビジョン処理、経路計画などの機能設定とデータの集りのことです。ソリューションを実装する前に、Mech-Viz プロジェクトを作成する必要があります。
サンプルプロジェクトを新規作成してそのワークフロー及びパラメータ設定を参考できます。また、ユーザーズマニュアルの指示に従って空白プロジェクトを新規作成することもできます。
プロジェクトリソースを設定
空白プロジェクトを新規作成した後、ロボットハンドや対象物、シーンの物体など、プロジェクトに必要なリソースを設定します。これらのリソースは、より確実に現場を再現して衝突を回避したロボット移動経路を生成することに役立ちます。
ワークフローを構築
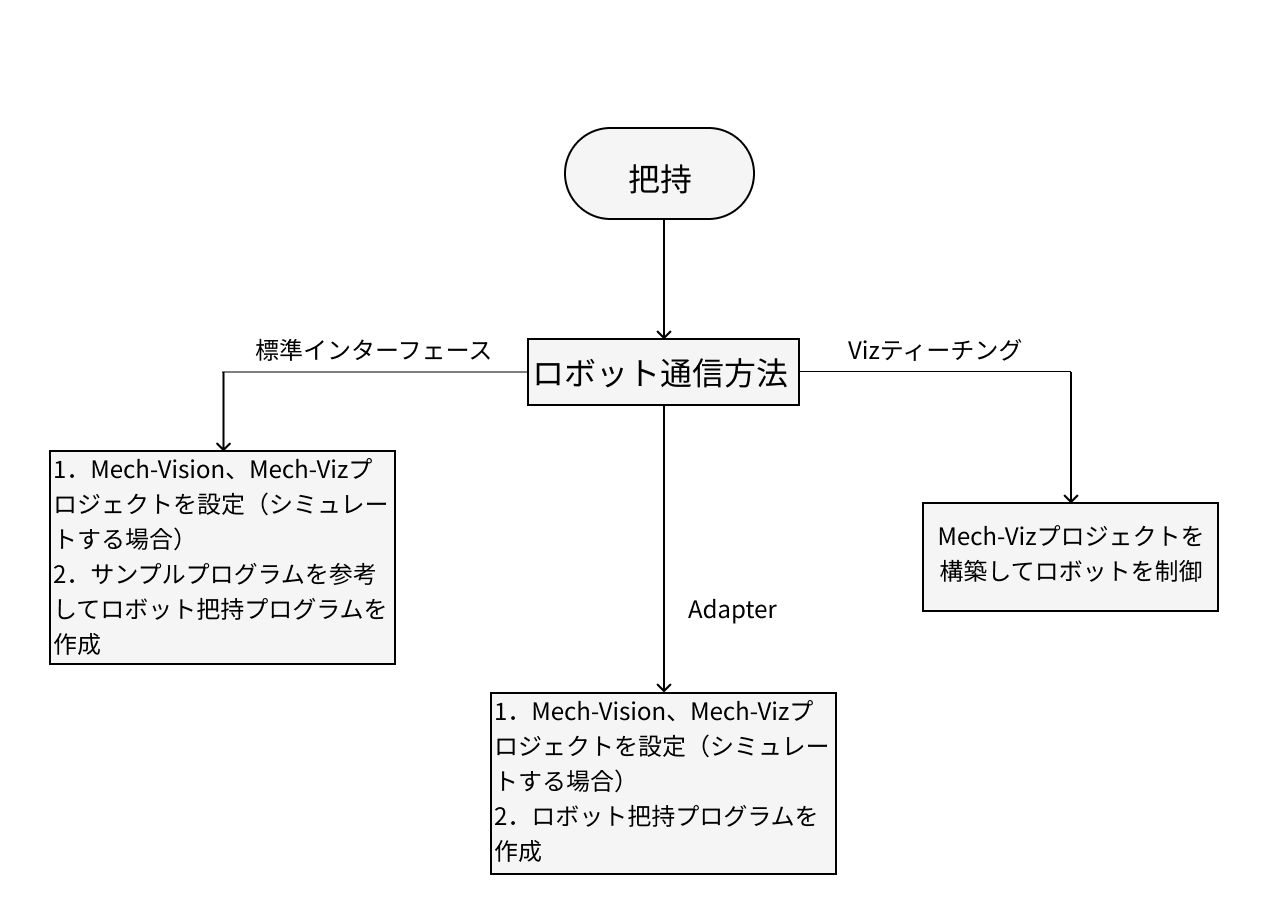
リソース設定を完了させてから、ワークフローを構築します。これによってロボットの精確な把持をガイドします。下図に示すように、ワークフローの構築方法は、選択したロボット通信方式によって異なります。
-
標準インターフェース通信を使用した場合、ロボット側でロボットの把持プログラムを作成する必要があります。詳細なガイドは、ロボットの把持作業のワークフローを構築(標準インターフェース通信)をお読みください。
-
Vizティーチング通信を使用した場合、Mech-Viz でロボットの把持作業のワークフロー(Mech-Viz プロジェクト)をグラフィカルに構築できます。
Mech-Viz ワークフローを構築するには、Mech-Vizワークフローの構築をご参照ください。
衝突検出設定
把持のプロジェクトでは、ロボットハンドと対象物、コンテナまたはシーンの物体の衝突を回避することは非常に重要です。シミュレートする前に、衝突検出を設定してください。
仮想ロボットを実行する
衝突検出を設定後、実行のシミュレーションを実行してプロジェクトをテストします。
ロボット実機を実行する
テストに問題がなければ、ロボット実機を動かすことができます。