モデル座標系を調整
| クリックして STL モデルファイルをダウンロードして使用します。 |
事前にモデル編集ソフトウェアで座標系を設定することを推奨します。導入したモデルの座標系が正しい場合は調整する必要はないですが、正しくない座標系を本節の説明に従って調整してください。
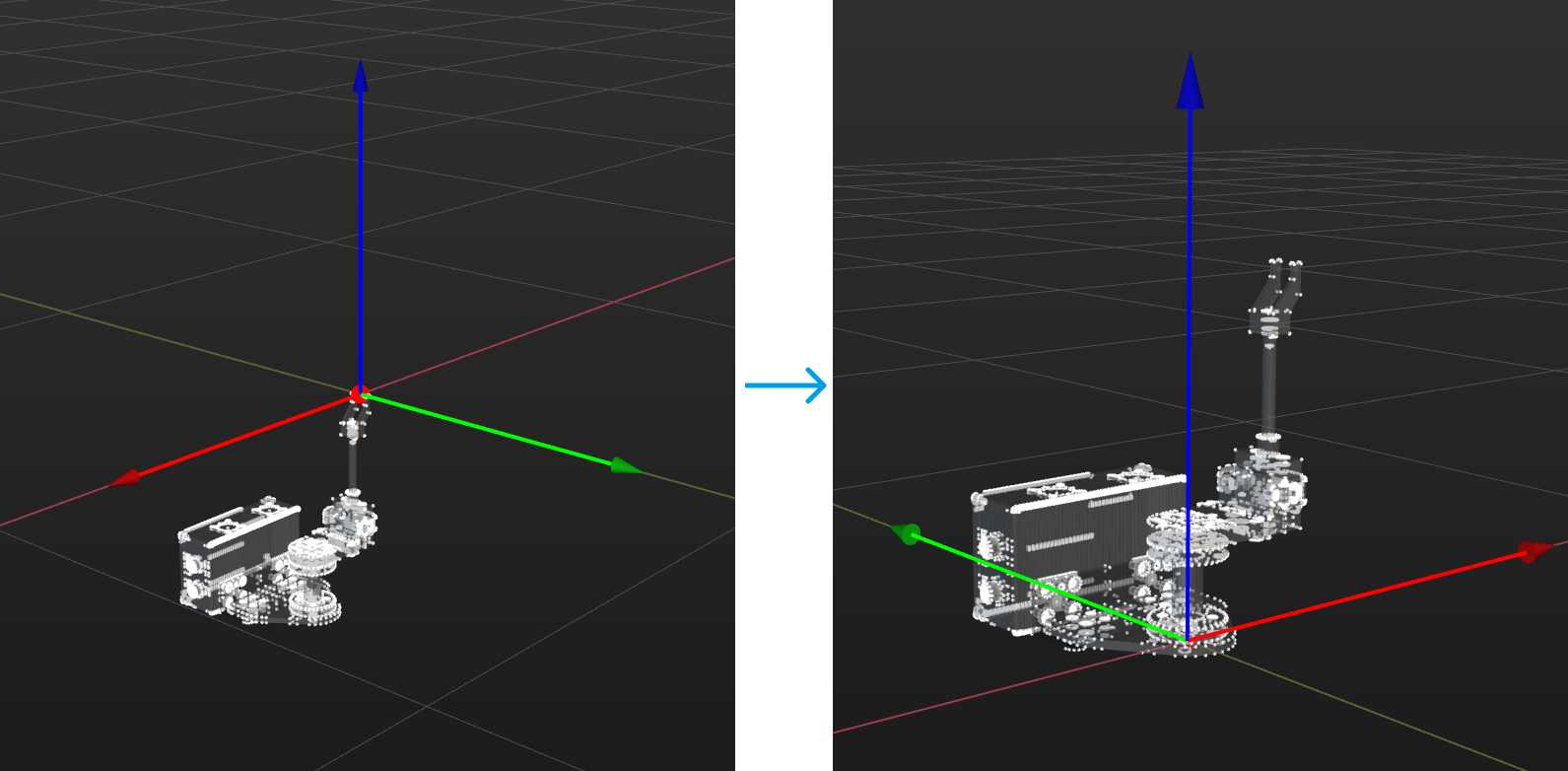
モデル座標系の原点は、ロボットハンドのフランジ中心にあり、Z 軸はフランジ取付平面に垂直して外側に向きます。
下図に示すように、ロボットハンド座標系はフランジではなく、グリッパの中心部にあるため座標系を改めて設定しなければなりません。右の図は、調整後の正しい座標系を示します。
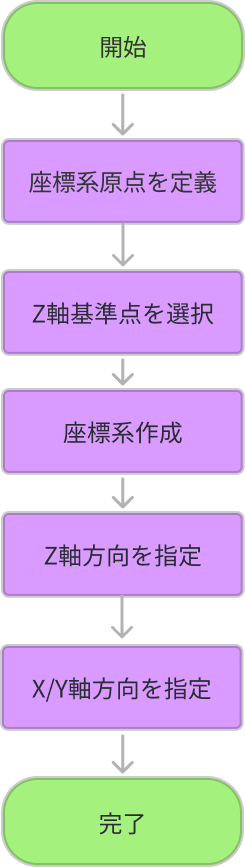
モデル座標系を調整する手順は下図に示します。
| 次の内容をお読みになる前に、選択ツールの使用方法を把握してください。選択ツールについては、選択ツールの使用方法をご参照ください。 |
操作手順
座標系原点を確認する
-
基準モデルパネルでモデルを選択します。
-
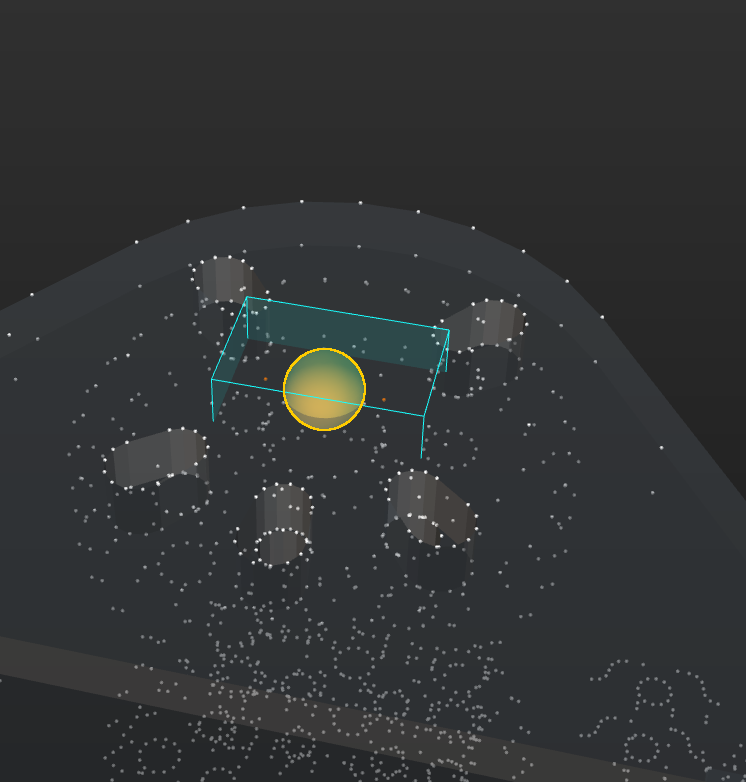
この例では、フランジコネクタ表面の 2つのピクセルを使用してロボットハンド座標系原点を定義できます。ツールバーの直方体選択をクリックし、この 2つのピクセルだけを囲むように調整します。

するとソフトウェアは選択したピクセルに基づいて囲んだ部分の中心点を生成します。ピクセルをできる限り正確に選択してください。 -
ツールバーの中心点を作成をクリックします。すると 2つのピクセルの中心に黄色い点が出てきます。
-
中心点グループの下でこの点をクリックして「座標系原点」と名付けます。
-
ツールバーの直方体選択の選択を解除します。
Z 軸基準点を指定する
-
本節では、Z 軸を垂直下向きにする必要があります。フランジコネクタの下の穴の中心点を設定して、Z 軸の方向を決定できます。ツールバーの円柱選択を使用して穴の下の円を選択します。

-
ツールバーの中心点を作成をクリックして穴の中心点を生成します。

-
中心点グループの下でこの点をクリックして「Z 軸基準点」と名付けます。
-
ツールバーの円柱選択の選択を解除します。
座標系を作成する
-
ツールバーの座標系設定をクリックします。
-
座標系パラメータパネルの中心点を選択をチェックし、座標系原点の右の未選択ボタンをクリックします。するとそれがアクティブ化済みに変わります。
-
中心点グループの下の「座標系原点」をクリックし、選択された点を基に生成された座標系が表示されます。この時、座標系原点の右のボタンは、選択済みとなります。

Z軸方向を確認する
-
座標系パラメータパネルの Z軸の右のボタンをクリックし、すると未選択がアクティブ化済みとなります。
-
中心点グループの下の「Z軸基準点」をクリックします。これで Z 軸の設定が終わります。
X/Y軸方向を確認する
-
この例では、座標系の X 軸がカメラの長辺に平行しており、グリッパーの外側に向きます。フランジコネクタの表面のピクセルを使用して X 軸の方向を指定することもできます。
-
座標系パラメータパネルの X軸の右のボタンをクリックし、すると未選択がアクティブ化済みとなります。
-
中心点を選択のチェックを外します。
-
編集エルあでは、カーソルをフランジのピクセルに合わせると目標点が赤色になります。ピクセルをクリックします。これで X 軸の設定が終わります。

-
原点の位置と X・Y 軸の方向を指定した後、座標系パラメータパネルの確認をクリックして座標系の調整を終了します。

|