配列タイプグリッパ
把持方法の配列タイプグリッパを選択すると、以下のパラメータを設定できます。
ロボットハンド設定を参考して対応するロボットハンドを設定してください。
移動ステップの共通パラメータ
移動目標点を送信
デフォルトではチェックが入っています。相手側(ロボットなど)に現在の位置姿勢を送信します。チェックを外すと、現在の経路点を送信しませんが、計画する経路に残ります。
移動コマンドの後の非移動コマンドをスムーズに実行することを試行
デフォルトではチェックが外れており、 移動ステップ の間にビジョン処理による認識、DO を設定、DI をチェックなどの非移動ステップを接続すると、経路点の送信を中断し、ロボット実機動作中に一時中止することがあります。
チェックを入れると、現在のステップの実行終了を待たずに次のステップを実行できます。これにより、ロボットがよりスムーズに動作します。ただし、ステップが途中で終了する可能性があります。
ステップが途中で終了する原因とは
Mech-Viz 実行中、ロボットに同時に複数の経路点を送信しますが、最後の経路点が現在のロボットの関節角度と一致しているかのみを判断します。一致していると判断したら、ロボットが最後の経路点に到着していると見なします。
例えば、10 の移動ステップがある経路では、移動ステップ 5 の位置姿勢は最後のステップの位置姿勢とは同じとします。ロボット移動速度が遅くいと、5つ目の経路点に到着した後現在の関節角度を Mech-Viz に送信します。5つ目の移動ステップは最後の移動ステップとは、位置姿勢が同じなので Mech-Viz はロボットが全ての経路点に移動したと判断してコマンド実行が途中で終了する可能性があります。
配置された対象物との衝突を検出しない
衝突検出パネルの対象物衝突検出を有効にした場合、このオプションをチェックするとロボットとロボットハンド、配置済み対象物の衝突を検出しません。衝突の誤検出を回避するために、把持/配置が配置に設定されたステップの後に続く移動ステップではこのステップをチェックします。
例
吸盤の TCP は吸盤の表面ではなく、モデル内部にあるのは一般的です。箱を把持する時に、吸盤のモデルと箱モデルとは重なり合うことになります。しかし、ソフトウェアはロボットハンドと把持済み対象物との衝突を検出しないので把持しているときに衝突発生のメッセージは出てきません。箱を配置した後、その箱のモデルはシーンのモデルになり、ロボットハンドと箱のモデル(シーンのモデルとして)の衝突を検出してメッセージを表示します。この場合、タスクを完了できません。
これをチェックするとロボットやロボットハンドと配置済み対象物モデルとの衝突を検出しないので上記の問題を解決できます。
点群との衝突検出モード
通常、自動に設定します。このモードでは、衝突検出パネルの点群衝突検出設定内容が直接適用されます。ロボットが把持してから配置するまでの移動ステップについては、検出に設定します。
自動 |
デフォルト。衝突モデルパネルの点群衝突検出をオンにすると、「ビジョン処理による移動」ステップと「ビジョン処理による移動」に依存する「相対移動」ステップにだけ点群衝突検出を実行し、その他の移動ステップには実行しない |
検出しない |
ステップの点群衝突をいずれも検出しない |
検出 |
ステップの点群衝突を全部検出する |
対象物の対称性を使用しない
このパラメータは、移動ステップの目標点タイプが対象物位置姿勢に設定された場合にのみ使用できます。
ここの対称性は、ワークライブラリで衝突モデルを設定する時に事前に設定した把持されている対象物の回転対称性です。
無し |
初期値。対称性を無効にしない |
Z軸 |
Z 軸を中心とする対称性だけを無視しない |
XY軸 |
XY 軸を中心とする対称性だけを無視しない |
全て |
物体の対称性を使用しないように設定すると、ロボットが物体の位置姿勢に正確に到達して対象物を配置しない |
| 移動ステップをワーク配置に使用するとき、回転対称性を使用するとワーク配置位置の一致性を保証できません。ワークの配置姿勢を指定したい場合に全てのワーク対称性を無視してください。 |
計画が失敗した時の出口
チェックすると、計画に失敗出口が追加されます。
現在のステップの経路計画が成功すると、ワークフローは成功出口から実行します。失敗すると、ワークフローは計画のに失敗出口から実行します。複数の計画失敗出口がある移動ステップがあるワークフローは、最初の移動ステップの計画失敗出口から実行します。
把持された対象物との衝突検出モード
設定する前に、衝突検出パネルで対象物衝突検出を有効にしてください。
| 衝突検出を有効にしなければ衝突のリスクが高まるので注意が必要です。 |
シーンの物体との衝突を検出しない
チェックすると把持済み対象物とシーンの物体との衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
ロボットとの衝突を検出しない
チェックすると把持済み対象物とロボットとの衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
点群との衝突を検出しない
衝突検出パネルで点群衝突検出を有効にしたままこのオプションをチェックすると、把持済み対象物と点群との衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
ビジョン処理の結果の全体的設定
ビジョン処理の結果を再使用
使用シーン
デパレタイジングなど一度の撮影で複数回の把持が必要な場合に適用されます。ただし、いずれかの物体を把持しても、他の把持対象物の位置姿勢に影響を与えないことを前提とします。
機能
この機能が無効の場合、ロボット把持経路が「ビジョン処理による移動」ステップによって計画されるたびに、未使用の把持点は破棄されます。
この機能を有効にすると、前回未使用または計画に失敗した把持点が保持され、次回の計画で継続して使用されます。これにより、同一のビジョン結果に対する複数回の把持が実現し、把持点が尽きるまで再撮影は不要となります。
この機能は、「把持点が使い尽くされたか」ステップと合わせて使用する必要があります。
例:

ビジョン処理の結果を共有
使用シーン
この機能は、複数の「ビジョン処理による移動」ステップで同一のビジョンサービスが選択され、かつ同一のビジョン結果を共有する必要がある場合に適用されます。
機能
この機能をを有効にすると、同一ビジョンサービスを選択した「ビジョン処理による移動」ステップは同一のビジョン結果を共有します。
いずれかの「ビジョン処理による移動」ステップが把持経路の計画に成功し、対応する把持点を使用した後、未使用の把持点は保持され、後続の共有ステップで再利用可能となります。結果を共有するすべての「ビジョン処理による移動」ステップの計画が完了した後、残りの把持点は破棄されます。
また、この機能は「ビジョン処理の結果を再使用」と併せて使用できます。2つの機能が同時に有効化されている場合、結果を共有するすべての「ビジョン処理による移動」ステップが今回の計画を完了しても、残りの把持点は破棄されず、把持点が尽きるまで次回の計画に残されて使用されます。
補助的機能
ビジョン処理のよるコンテナの再度位置決め
| Mech-Vision の出力ステップのポートタイプがカスタムの場合、コンテナとその他のシーンの物体位置姿勢を更新するために、ここのビジョン処理によるコンテナ位置姿勢を更新をチェックしてください。Mech-Vision の「出力」ステップのポートタイプが事前定義済み(ビジョン結果)の場合、「出力」ステップのパラメータパネルでシーンの物体を更新をチェックし、かつ Mech-Viz のシーンの物体を更新ステップと併用してシーンの物体位置姿勢を更新してください。 |
ビジョン処理の結果によってコンテナ位置姿勢を更新パラメータをチェックすると、ビジョンサービスが対象物を認識する時にコンテナも認識し、そのモデルの位置を動的に更新します。これにより、ロボットとコンテナの衝突を正確に検出できます。
コンテナの位置決め機能は、ビジョン処理結果の scene_object_names、scene_object_sizes、scene_object_poses の 3つのフィールドを通じて更新されるシーン物体の名前、位置姿勢、寸法を定義します。
ビジョン処理の結果フィルター
-
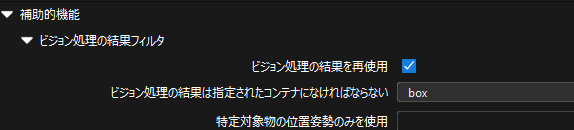
ビジョン処理の結果は指定されたコンテナになければならない
「ビジョン処理による移動」ステップが指定コンテナの範囲内のビジョン処理の結果を受信するように制限します。指定コンテナの範囲外の結果は使用されません。
各コンテナのビジョン処理の結果の有効範囲は、それぞれの設定ウィンドウで設定できます。「位置姿勢の有効範囲を設定」がオンになっているコンテナだけがこのパラメータのリストに表示されます。
例:
「box 1」を追加し、このコンテナの「位置姿勢の有効範囲を設定」パラメータをオンにします。

ドロップダウンリストに「box 1」を選択します。
-
位置姿勢をフィルタリング
全部使用
フィルタリングせずにビジョン処理の結果の位置姿勢を全部使用して経路を計画します。
対象物情報によって
選択すると、指定対象物名を使用パラメータのドロップダウンリストからワークライブラリで設定した対象物を選択できます。複数の対象物名によって位置姿勢をフィルタリングできます。
把持位置姿勢名によって
選択すると、指定対象物名を使用パラメータのドロップダウンリストから把持位置姿勢名を選択できます。複数の把持位置姿勢名によって位置姿勢をフィルタリングできます。
把持点ラベルによって
選択すると指定した把持点位置姿勢ラベルによってフィルタリングします。指定把持点のラベルを使用するにラベルを入力すると、このラベルが付いた把持点だけが経路計画に使用されます。複数のディープラーニングラベルとワークライブラリで設定した数字ラベルが使用できます。ラベル間には、カンマ (,)、コロン (:)、またはセミコロン (;) で区切ることができます。ラベルと区切り文字の間にスペースは必要ありません。
同じ対象物の再度把持回避
このパラメータは、把持に失敗した場合に、同じ場所で再び失敗することを回避するために使用されます。
「失敗する可能性のある把持点をフィルタ」失敗する可能性のある把持点をフィルタをオンにすると、以下のパラメータが調整できます。
-
フィルタ対象
-
把持点: 失敗する確率が高い把持点だけは試行優先度を下げられ、または破棄されます。
-
対象物: 対象物のいずれかの把持点が失敗する可能性が高いと判断されたらこの対象物にある全ての把持点は試行優先度を下げられ、または破棄されます。
-
-
優先順位下げ半径
最近のビジョン処理の結果にある把持点は「このパラメータ値を半径とし、前回のラウンドで正常に計画された把持点を中心とする球」の範囲内にあれば、それは試行優先度を下げられます。
-
試行破棄範囲半径
最近のビジョン処理の結果にある把持点は「このパラメータ値を半径とし、前回のラウンドで正常に計画された把持点を中心とする球」の範囲内にあれば、その把持点は今回の計画では破棄されます。
クランクシャフトを一つ把持するとき、もし初回の試行が失敗し、そのクランクシャフトを動かして位置が変わったら、次回の把持では成功する可能性があります。このように、優先順位下げ半径 を使用して優先度を下げますが、破棄はしません。もし試行が失敗し、かつそのクランクシャフトの位置が変わらなかったら、二回目の把持でも成功することはありません。この場合に無駄な動作を回避するために 試行破棄範囲半径 を使用してこの位置姿勢を破棄します。
|
フィルタ対象が把持点に設定されている場合:失敗率が高いと見なされる把持点のキュー長上限は100に設定されており、調整パラメータは提供されません。一回のビジョン結果における把持点の数が100未満の場合、キュー長はその数と一致します。上限を超えた場合、最初にキューに追加された把持点がキューから除去され、次回の把持計画に再参加することが可能です。 フィルタ対象が対象物に設定されている場合:失敗率が高いと見なされる対象物のキュー長上限は100に設定されており、調整パラメータは提供されません。一回のビジョン結果における対象物の数が100未満の場合、キュー長はその数と一致します。上限を超えた場合、最初にキューに追加された把持点がキューから除去され、次回の把持計画に再参加することが可能です。 |
把持順序
把持順序付け戦略
-
組合せの対象物数の順序:組合せの対象物の数によって多い順から把持します。
-
ビジョン処理の結果の順序:ビジョン処理の結果の順序に従って把持します。
-
できるだけビジョン処理の結果による:ビジョン処理の結果に従って把持します。失敗した上位の結果をスキップすることができ、その後の結果を使用して続けて計画します。
マッチング条件
マッチング戦略
「位置をマッチング」と「位置と方向をマッチング」を選択できます。
-
位置をマッチング:ロボットハンドと対象物の位置だけをマッチングし、TCP と対象物位置姿勢の角度を考慮しません。
-
位置と方向をマッチング:ロボットハンドと対象物の位置、また TCP と対象物位置姿勢の角度を考慮してマッチングします。
距離しきい値
対象物位置を円心に、距離しきい値を半径に円を作成します。配列タイプグリッパの全てのエンドがこの円に収まれば、マッチングが成功したとされます。
例
-
下図ではしきい値を 30mm に設定します。

-
3つのエンドがあるグリッパを使用します。エンドの間隔は 100mm です。

-
把持を計画する時に、ソフトウェアは 3つの吸盤をそれぞれ把持位置(水色の円)に合わせます。
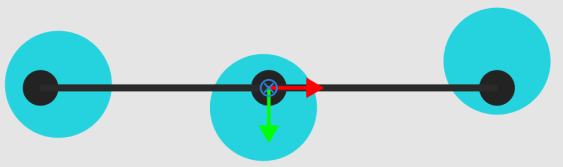
3つの吸盤を全部マッチングできない場合、2つの吸盤をマッチングします。
角度しきい値
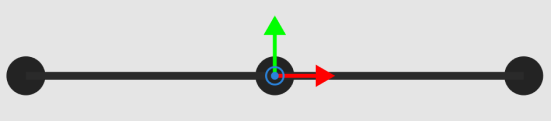
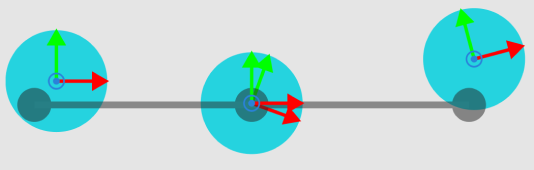
TCP の X 軸と各対象物 X 軸の角度がいずれも「角度しきい値」より小さい場合に成功したとされます。
-
ソフトウェアは、TCP 座標を TCP X 軸を中心に 180°回転させて Z 軸を上向きにし、把持点の位置姿勢の向きと一致させます。
-
対象物位置姿勢 X 軸と TCP の各軸との角度を確認します。角度が角度しきい値内であれば、把持に成功すると判断され、超えたら失敗すると判断されます。
このモードでは、組合せに物体のロスが発生し、かつこの組合せは回転対称性がなくても構いません。
例えば、4つの吸盤がある配列タイプグリッパの場合に、吸盤の番号をそれぞれ 0、1、2、3 とします。3つの物体があり、位置は OOXO であれば、吸盤 0、1、3 をオンにする必要があります。OOXO を 180° 回転させて OXOO にしたら、回転対称性はありません。