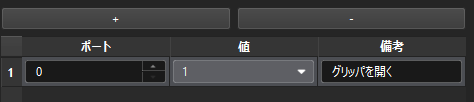
DO を設定
| 新バージョンの DO を設定ステップは、過去バージョンの複数の DO を設定ステップの機能が組み入れられています。 |
機能
ロボット産業においては、「DO」とはデジタル入力信号を指します。デジタル出力信号は、オートメーションシステム内の機器またはコンポーネントを制御するために使用される電気信号です。デジタル出力信号はハイレベルまたはローレベルで表され、接続されたデバイスまたはアクチュエータを有効または無効にするために使用されます。デバイスとは、吸着ハンドやモーター、ソレノイドバルブ、リレー、表示灯、その他の種類の電気部品のことです。
このステップは、外部デバイスに信号を送信し、グリッパーの開閉、吸盤の開閉などの特定の動作を実行させます。また、コンベアベルトの制御やアラームのトリガーにも使用できます。