使用手順
本節では把持シミュレーションツールの導入前提と具体的な設定手順について説明します。詳細は以下の図の通りです。

以下、各段階について詳しく説明します。
導入前提
把持シミュレーションツールを使用する前に、シミュレーションプロセスをスムーズに進めるため、あらかじめ Mech-Viz で基本的なワークフローを構築しておく必要があります。

シミュレーション検証を開始する前に、現在のワークフローが把持シミュレーションのサポート要件を満たしているか必ず確認してください。フローが要件を満たさない場合、システムはエラーメッセージを表示します。主要なチェック項目:
-
出口制限:「DOを設定」および「メッセージによって異なる分岐を実行」ステップは固定出口のみに対応しており、有効な出口を設定する必要があります。
-
使用禁止のステップ:ワークフロー内に以下の非対応ステップを含めることはできません。
-
分類
-
シーンの物体を更新
-
把持済み対象物を更新
-
パレットの位置姿勢を更新
-
ロボットハンドをチェック
-
カウンター
-
完了確認
-
-
構造の制限:ワークフロー内にループ構造を含めることはできません。
-
長さの制限:ワークフロー内のステップ数は 10,000 を超えてはなりません。
-
ビジョンステップの制限:
-
ワークフロー内には「ビジョン処理による移動」テップが1つだけ存在し、このステップはビジョン結果の再利用や共有に対応していません。
-
ワークフロー内の最初の移動ステップは必ず「移動」であり、その目標点タイプは「関節角度」に設定する必要があります。このステップで設定された関節角度は、各シミュレーション検証時におけるロボットの初期関節角度となります。
-
| 把持シミュレーションを開始するたびに、ツールバーの実行状態を維持がオフ状態であることを確認してください。複数回のシミュレーションによってビジョン処理による移動などのステップの履歴状態に異常が発生するのを避け、シミュレーションの正確性を確保します。 |
レイアウトシミュレーション
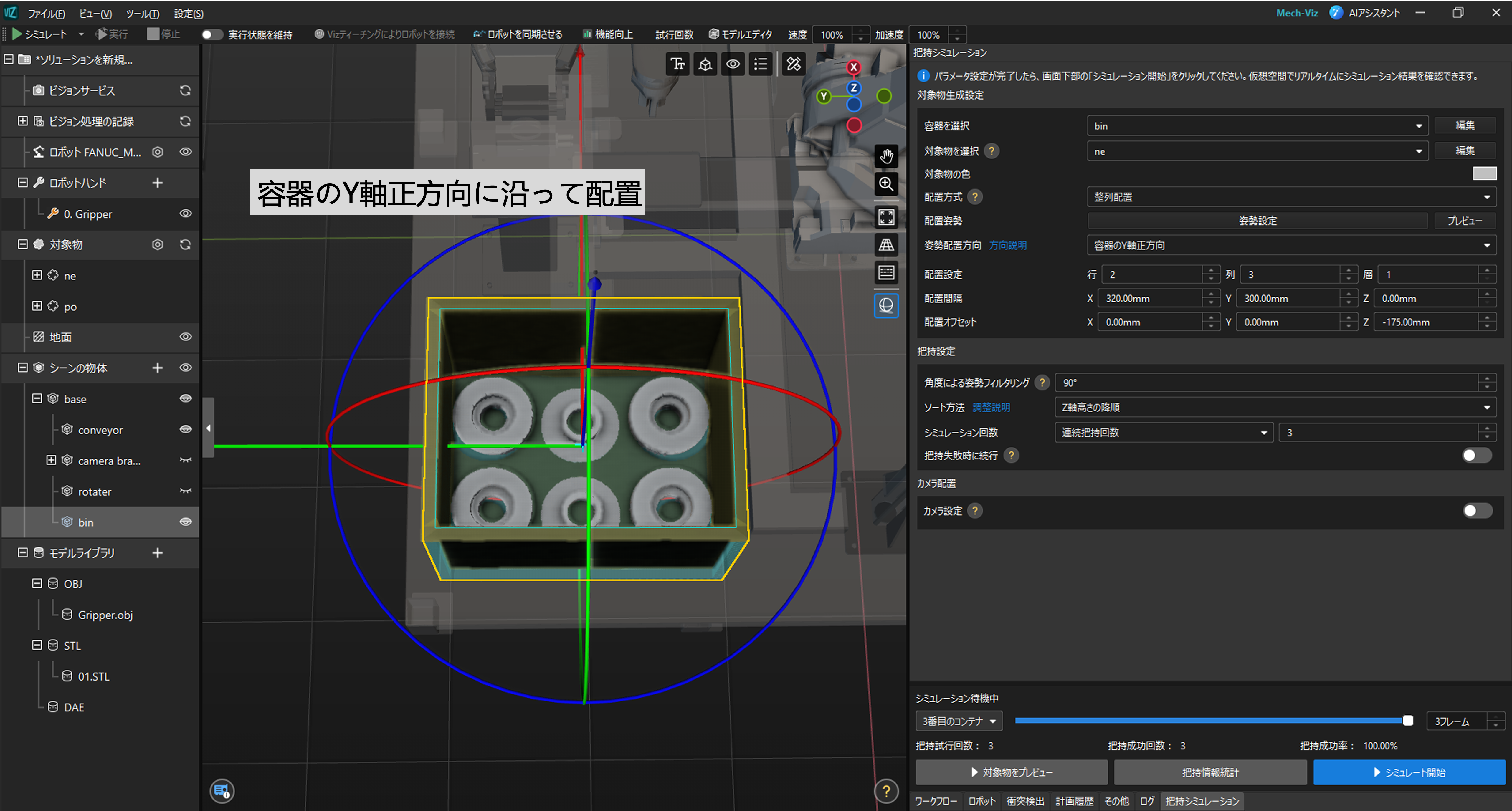
把持シミュレーションを実行する前に、容器と対象物になるワークを含む仮想シーンを構築する必要があります。ワークの配置方法や個数を適切に設定することで、シミュレーション環境を実際の現場状況に可能な限り近づけ、その後の把持戦略の検証のための基礎を築きます。
容器を選択
まず、シミュレーションシーンで使用する容器モデルを指定します。既存のプロジェクトから既存の容器を選択するか、新しい容器を追加してパラメータを設定することができます。
-
既存の容器が要件を満たしている場合は、そのまま使用できます。
-
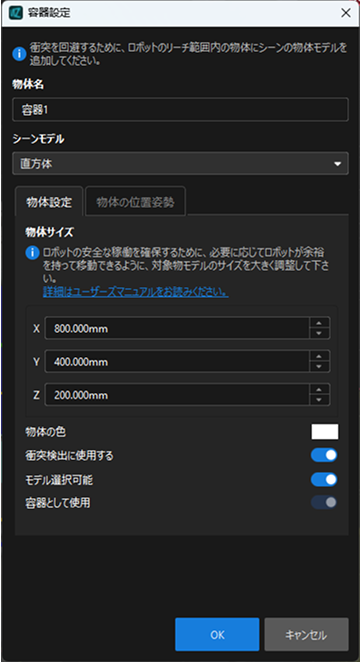
新しい容器を使用する場合は、新規容器をクリックして容器設定画面に入り、容器名、シーンモデル、容器サイズなどのパラメータを設定します。ここで、シーンモデルは容器タイプの設定であり、箱、直方体、円柱が選択可能です。直方体または円柱を選択した場合、容器として使用パラメータはデフォルトでチェックされ、オフにすることはできません。
-
既存の容器設定を調整したい場合は、編集ボタンをクリックして修正します。
容器の新規追加または編集の具体的な設定手順は、シーンの物体の設定をご参照ください。
| で容器を設定する場合、容器として使用はデフォルトでチェックされていないため、手動でチェックしてください。 |
対象物の設定
容器を確定した後、シミュレーションに参加する対象物を選択し、その表示色を設定する必要があります。 対象物を選択する際:
-
プロジェクト内に既存のワークが要件を満たしている場合は、そのまま使用できます。
-
新しいワークを使用する場合は、新規対象物をクリックしてワークライブラリ画面に移動し、ワークを新規作成します。STL ファイルまたは基本幾何立体によるもモデル作成に対応しています。
-
既存の対象物設定を調整したい場合は、編集ボタンをクリックして修正します。
ワークモデルの設定が完了したら、対象物の色の横のカラーブロックをクリックし、シミュレーション内での対象物の表示色を設定します。
配置方式の設定
実際の生産要件に応じて、対象物の配置方法を選択します。バラ積みと整列配置が選択可能です。
バラ積み
ワークがランダムにコンテナ内に落下し、実際の生産場面におけるバラ積みの状態をシミュレートします。具体的なパラメータの説明と構成については、以下の表をご参照ください。
パラメータ |
説明 |
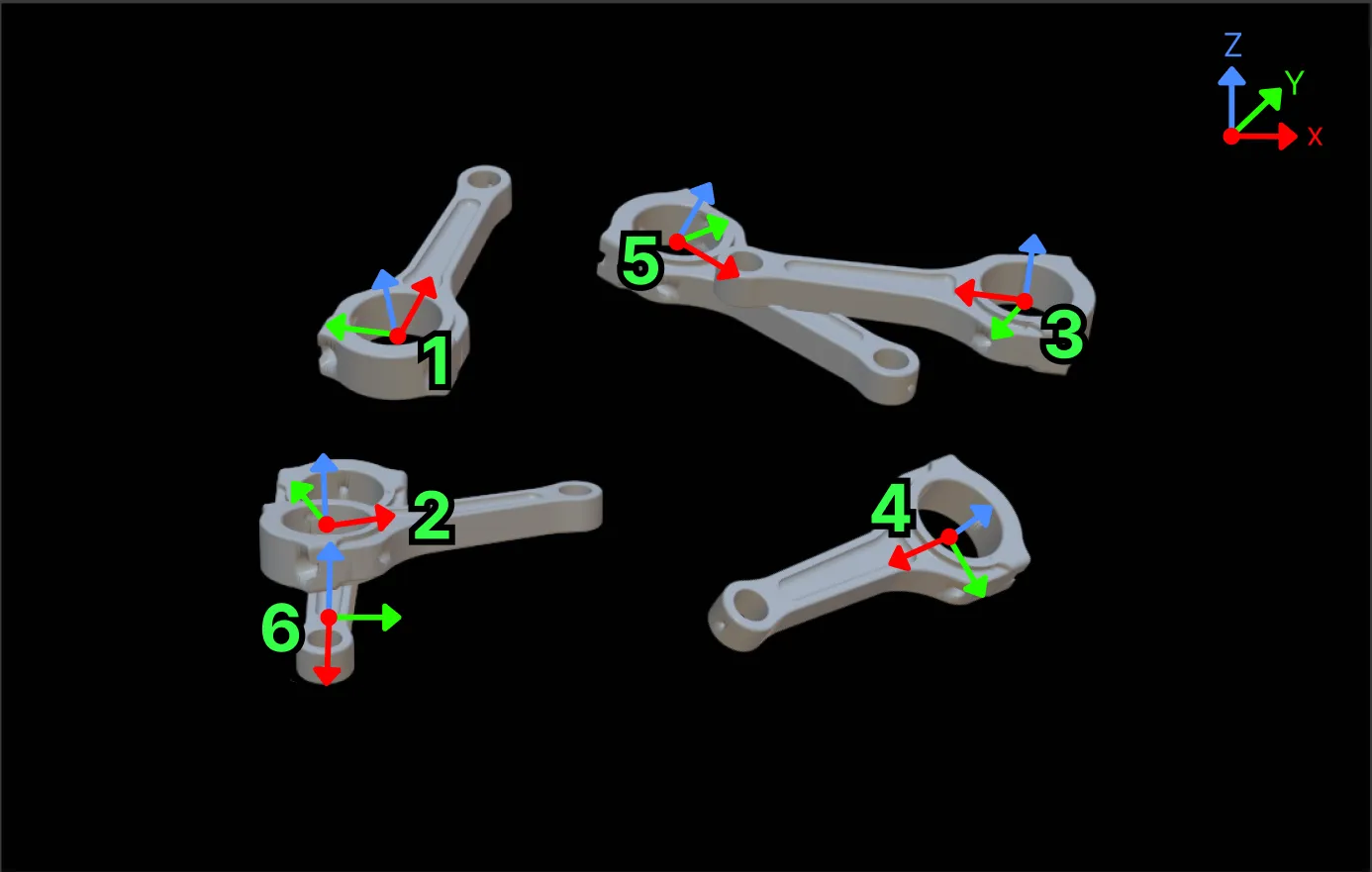
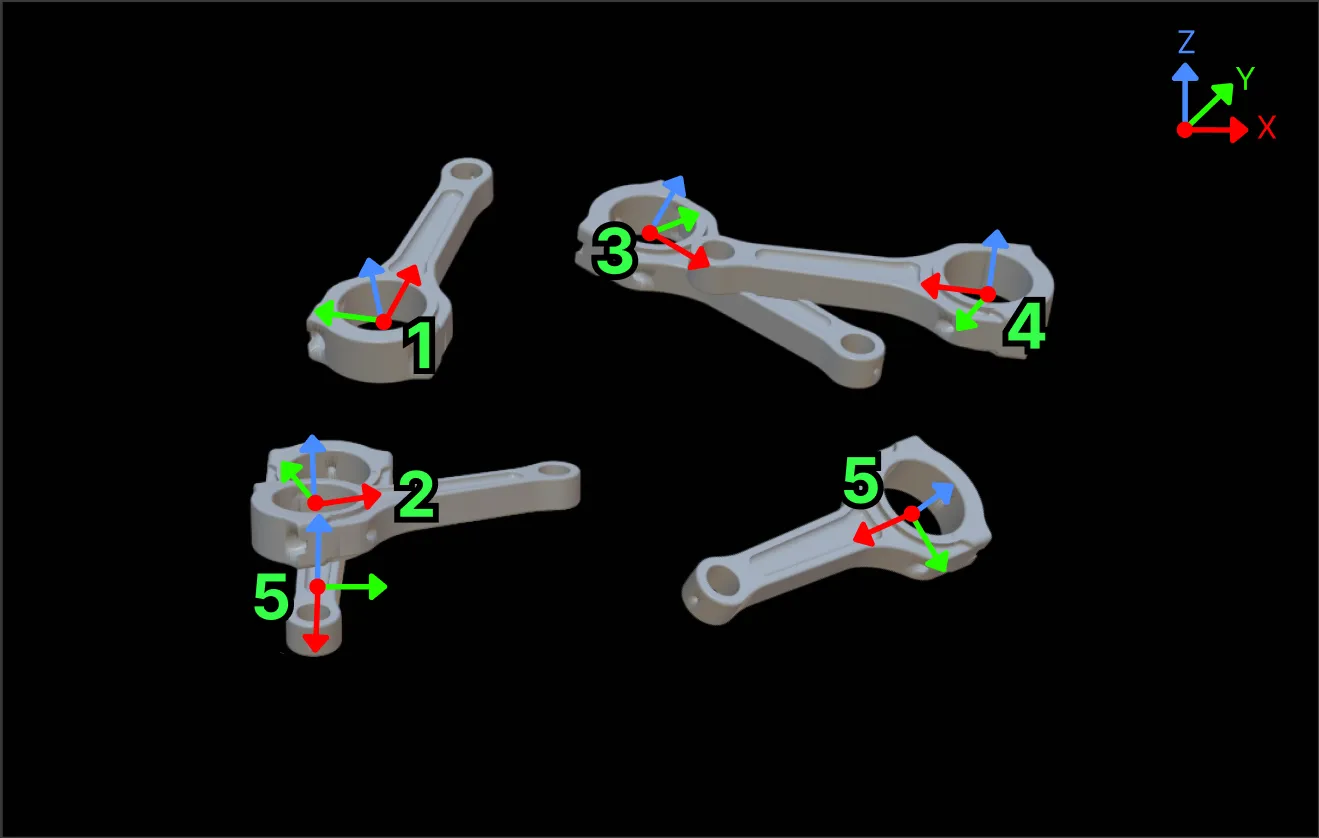
配置姿勢 |
対象物の向きを設定する。対象物座標系はデフォルトで容器座標系と一致する(対象物の X/Y/Z 軸の向きはキャリア X/Y/Z 軸の向きと一致)
|
落下エリア |
エリア内でのワークのランダムな落下地点の範囲を制限する。ワークがエリア外に落下した場合は自動的に削除され、指定されたエリア内に収まるまで再度落下を実行する
|
対象物の数 |
シミュレーションに参加するワークの総数を設定する。実際のニーズに応じて、適切な対象物の数量を設定してください。数量が多くなるほどシミュレーションの複雑さが増し、それに伴い実行速度が低下する |
整列配置
ワークを固定の位置と順序で配置し、規則正しく並べられた状態(整列状態)をシミュレートします。具体的なパラメータの説明と構成については、以下の表をご参照ください。
パラメータ |
説明 |
||
配置姿勢 |
対象物の向きを設定する。バラ積み配置の姿勢設定方法を参考に、適切な視点と回転角度を選択し、ワークの姿勢が実際の現場状況と一致するように設定してください |
||
姿勢配置方向 |
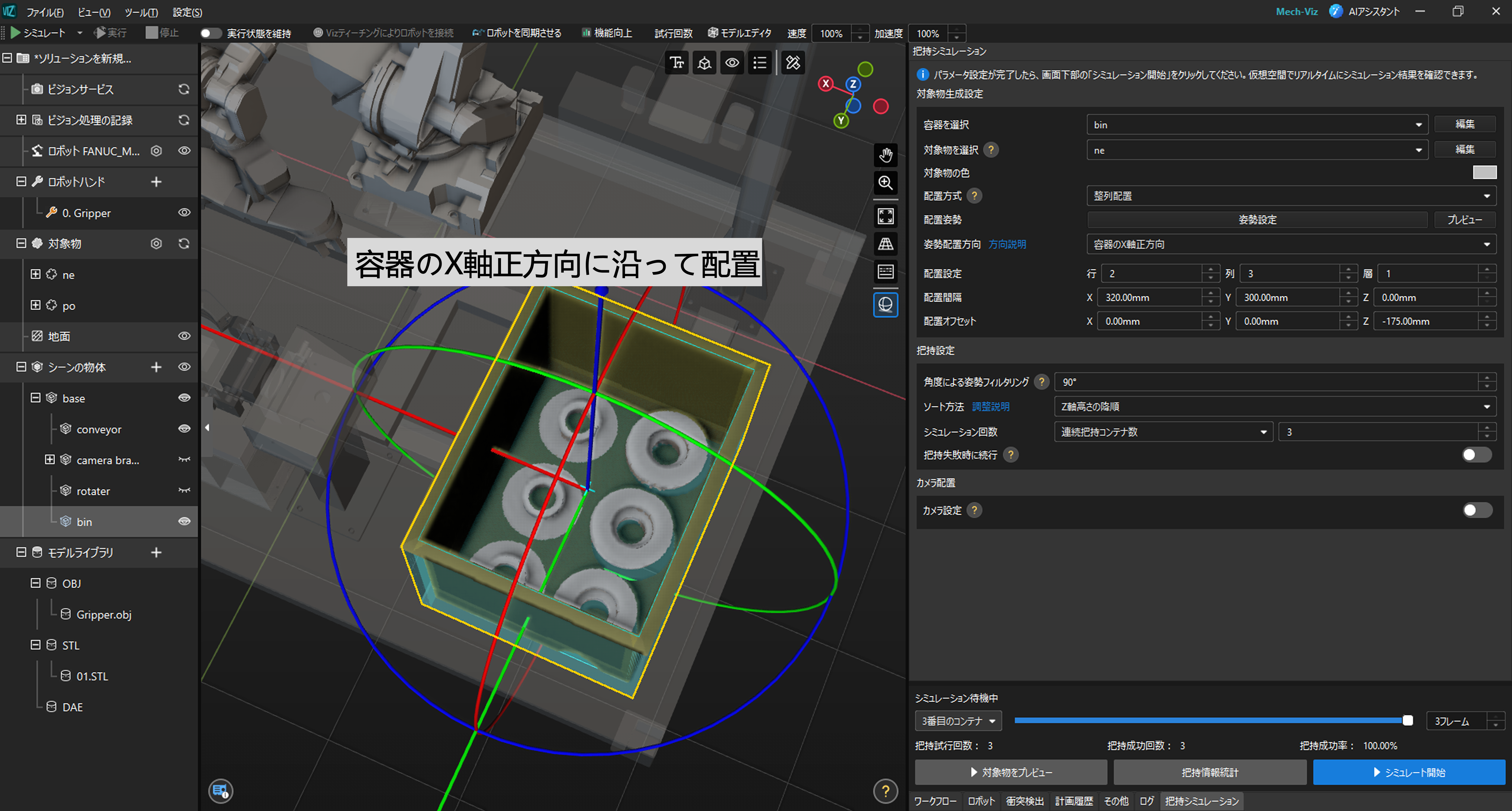
容器内にワークを配置する際の相対的な配列順序を指定する。容器の X 軸正方向、容器の X 軸負方向、容器の Y 軸正方向、容器の Y 軸負方向 に沿った配列が選択可能 システムは選択された方向に沿って、選択済みの姿勢を順番に繰り返し配置する。例えば、「容器の X 軸方向」を選択すると、容器のX軸に沿って異なる姿勢のワークが行単位で配置されます。「容器の Y 軸方向」を選択すると、容器のY軸に沿って異なる姿勢のワークが列単位で配置される。具体的な効果は下図に示します: 
|
||
配置設定 |
対象物の行数、列数、および層数を設定し、全体の配列構造を決定する |
||
配置間隔 |
隣接する対象物間の距離を設定する。X、Y、Z の3方向に対して個別に設定可能。間隔が狭すぎると把持時に衝突する可能性があるため、安全な距離を確保することを推奨 |
||
配置オフセット |
空間内における対象物全体の位置を調整する。容器の中心点を基準に X、Y、Z 方向のオフセット値を設定することで、全体を平行移動させる |
上記のパラメータを設定する際は、実際の生産や把持のニーズを考慮し、仮想空間の可視化表示を活用して対象物の配置調整を行うことを推奨します。
以下に、整列配置におけるワーク配置設定の操作と効果の例を示します。配置姿勢は2種類(Z 軸の正負方向)と仮定します。
-
容器の X 軸正方向の場合:
-
容器の Y 軸正方向の場合:
-
詳細操作:
把持設定
ワークシーンの構築が完了したら、実際の把持ロジックをより正確に反映させ、把持安定性や失敗が全体のパフォーマンスに与える影響を評価するために、把持戦略を構成する必要があります。
角度による姿勢フィルタリング
姿勢フィルタリングの角度しきい値を設定することで、傾斜角度が大きすぎる把持位置姿勢をフィルタリングできます。把持位置姿勢の Z 軸とワールド座標系の Z 軸とのなす角がこのしきい値より大きい場合、その把持位置姿勢はフィルタリングされ、その後の経路計画には参加しません。
| シミュレーション中に把持失敗が大量に発生する場合は、ワークライブラリに移動してワークの把持位置姿勢の設定を調整し、より多くの把持位置姿勢が計画に参加できるようにしてください。 |
ソート方法の設定
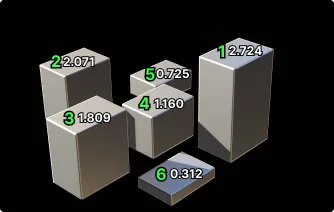
ソート方向は把持の優先順位を決定します。実際のニーズに応じて異なるソート戦略を選択できます。現在、複数の方法から選択できます。これには Z 軸高さの降順、重なり率の昇順、Z 軸とのなす角の昇順などが含まれます。詳細な説明は以下の通りです。
ソート方法 |
説明図 |
使用説明 |
Z 軸高さの降順 |
|
各対象物の把持位置姿勢の Z 値が高い順にソート |
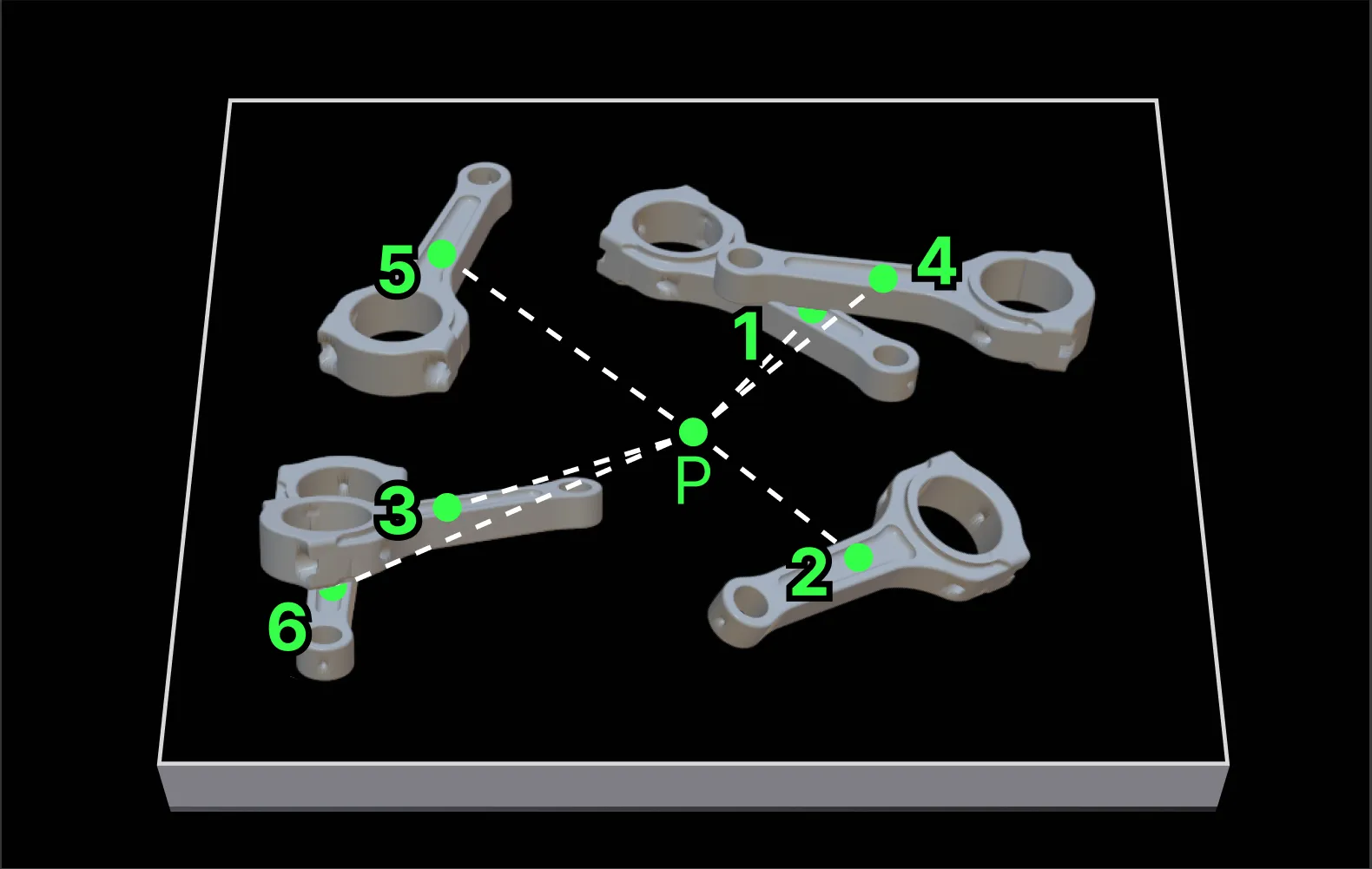
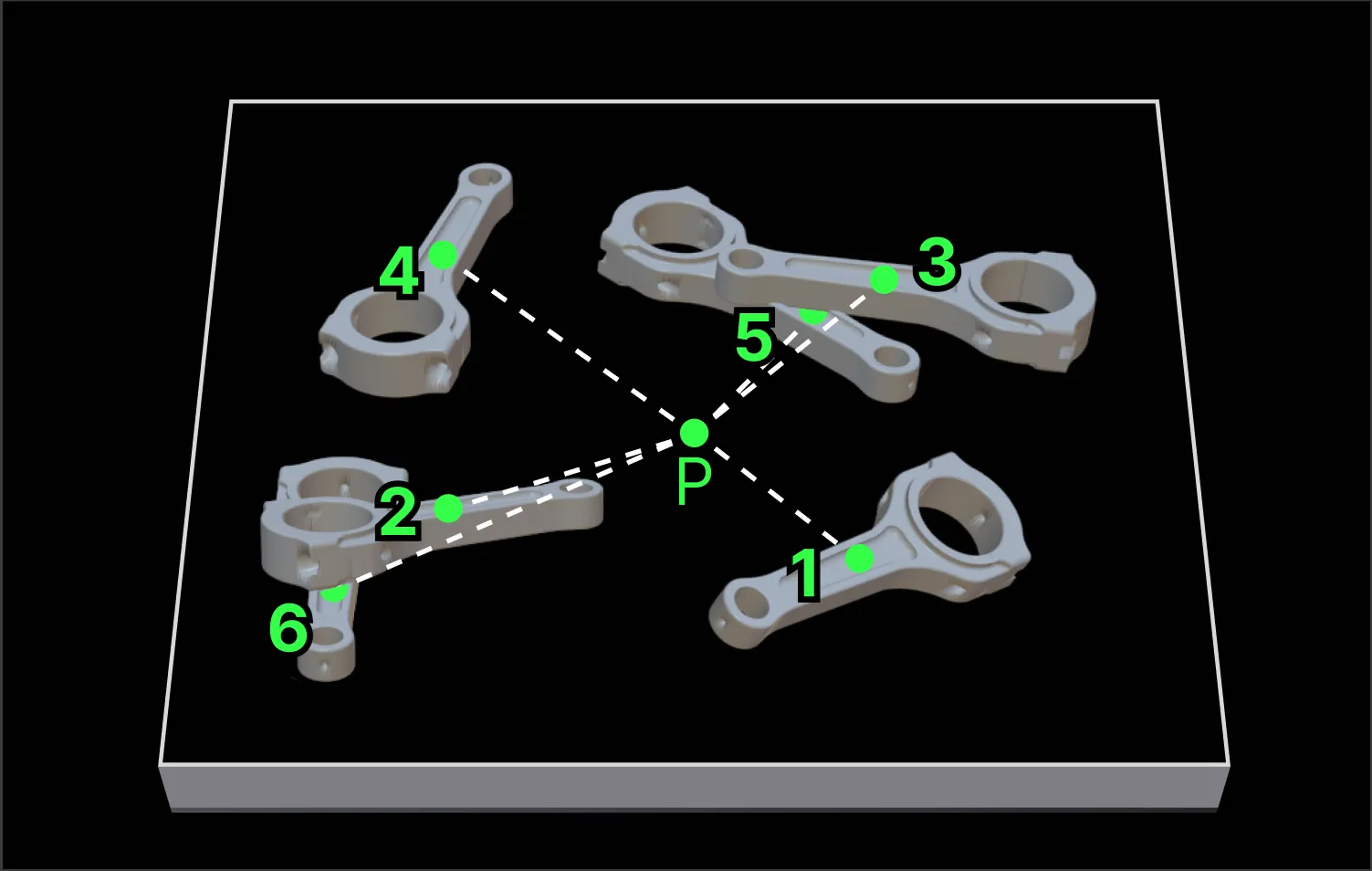
容器中心までの距離の昇順 |
|
把持点から容器中心までの距離が近い順にソート |
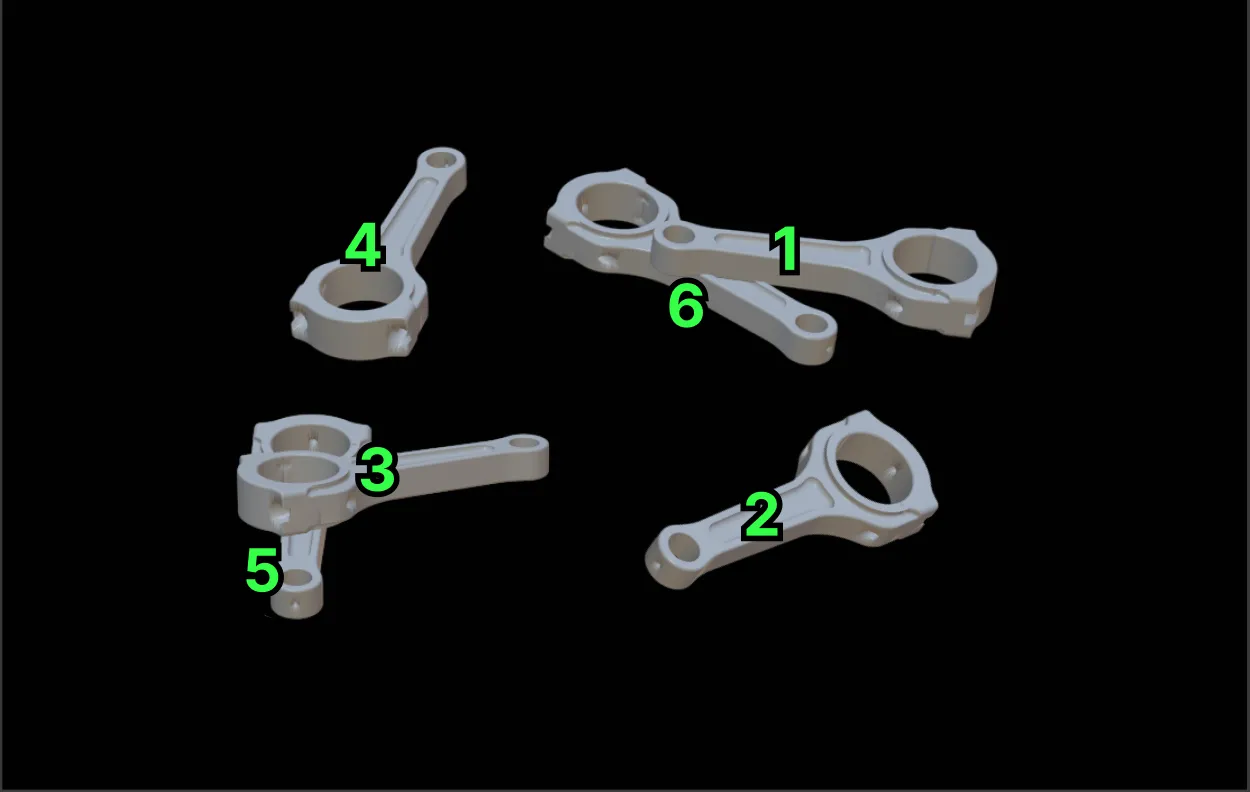
重なり率の昇順 |
|
各ワークと他のワークとの重なり率が低い順にソート |
重なり率の昇順 > Z 軸とのなす角の昇順 |
|
まず、他のワークとの重なり率が低い順にソートし、重なり率が同じまたは近い場合、Z 軸のなす角が小さい順にソート |
重なり率の昇順 > 容器中心までの距離の昇順 |
|
まず、他のワークとの重なり率が低い順にソートし、重なり率が同じまたは近い場合、容器中心までの距離が近い順にソート |
Z 軸とのなす角の昇順 |
|
把持点のZ軸とワールド座標系のZ軸とのなす角が小さい順にソート |
シミュレーション回数の設定
シミュレーション回数は把持の繰り返し実行回数を制御します。連続把持回数と連続把持コンテナ数の2つのモードに設定できます。
-
連続把持回数:同一コンテナ内で把持を連続実行し、設定回数に達するか、コンテナ内に把持可能なワークがなくなるまで継続します。把持するたびにシステムは把持結果を記録します。単一コンテナシーンにおける把持戦略の検証に適しています。
-
連続把持コンテナ数:複数のコンテナ間で把持を連続実行し、1つのコンテナの把持が完了するたびに次のコンテナが自動生成され、設定のコンテナ数に達するまで継続します。大量作業における把持戦略の安定性評価に適しています。
把持失敗時に続行
把持失敗後の処理方法を指定します。
-
有効にする場合、対象物の把持計画に失敗した際、Z方向の高さが最も高い対象物を削除し、残りの対象物の把持を続けて試行します。コンテナ内に対象物がなくなるまで繰り返します。干渉ワークの影響を除外し、理想的な条件での対象物の把持成功率の検証に適しています。
-
無効にする場合、対象物の把持計画に失敗した際、後続のすべての把持シミュレーションを直ちに停止します。実際の現場での切り取り率の検証に適しています。
| 把持失敗時に続行はシミュレーション回数と組み合わせて使用でき、シミュレーションの実行フローに影響を与えます。 |
-
把持失敗時に続行を有効にした場合:
-
連続把持回数モードでは単一コンテナ内で指定回数のみ実行し、完了後にシミュレーションは終了します。
-
連続把持コンテナ数モードでは1つのコンテナが完了するたびに次を自動生成し、設定数に達するまで継続します。
-
-
把持失敗時に続行を無効にした場合、選択したモードにかかわらず、把持計画に失敗した時点でシミュレーションを強制終了します。
カメラ配置(オプション)
把持シミュレーションでカメラの衝突検出やカメラ視野のカバー範囲の検証を行いたい場合、またはシミュレーション中にカメラが取得した画像データを保存して後続のビジョン認識プロセスで使用したい場合は、カメラ配置を有効にして関連設定を行ってください。この設定はオプションです。上記のニーズがない場合はスキップしても把持シミュレーションフローには影響しません。
| 現在は Eye-to-Hand 取り付け方式のカメラのみに対応しています。 |
カメラを選択
まず、カメラ設定を有効にします。カメラを選択をクリックし、ドロップダウンリストから既存のカメラを選択するか、新規カメラを作成します。
-
既存のカメラが要件を満たしている場合は、そのまま使用できます。
-
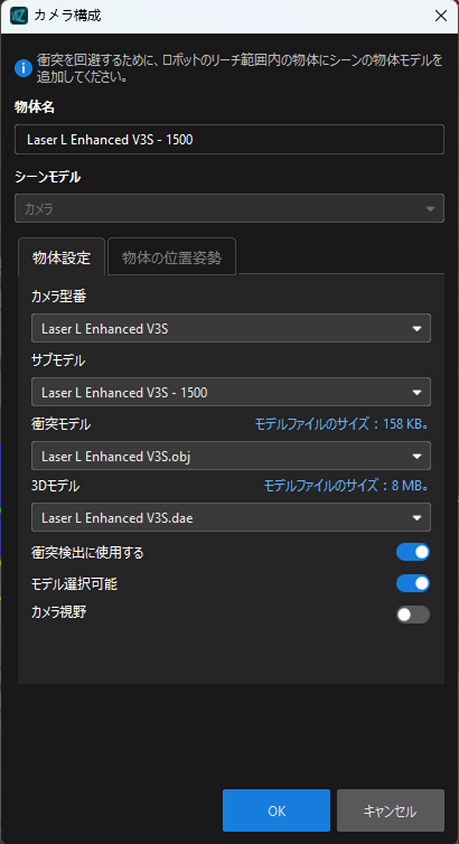
新しいカメラを使用する場合は、新規カメラをクリックしてカメラ構成ウィンドウに入ります。
-
物体名にカスタマイズのカメラ名を入力します。
-
シーンモデルはデフォルトでカメラに設定されており、変更することはできません。
-
物体設定画面で、実際の状況に応じてカメラ型番、サブモデル(ある場合)、衝突モデル、および3Dモデルを選択します。
-
初回構成時はカメラ視野を有効にすることを推奨します。これにより、後でカメラモデルの位置姿勢を調整しやすくなります。
-
新規追加されたカメラモデルは、デフォルトでロボット座標系の原点に配置されます。物体の位置姿勢をクリックしてカメラの位置姿勢に関するパラメータを設定します。
-
-
既存のカメラ設定を調整したい場合は、編集ボタンをクリックして修正します。
| で下のカメラ名を右クリックし、カメラ視野を表示/非表示することも可能です。この設定はカメラ構成ウィンドウのカメラ視野スイッチと連動しています。 |
シミュレーション検証
すべての設定が完了したら、シミュレーションの検証に進みます。システムはロボットの把持プロセスをシミュレーションし、把持結果と主要データをリアルタイムで集計します。これにより、把持計画の実現可能性とリスクを総合的に評価できます。
シミュレーション開始
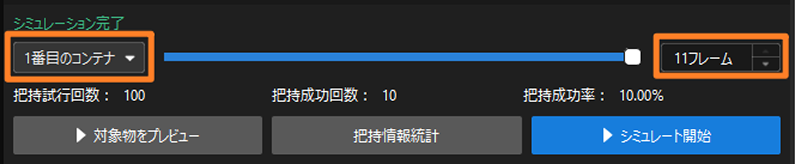
上記の設定が完了したら、把持シミュレーションの検証に進むことができます。シミュレーション開始をクリックすると、システムは現在の設定に基づいて把持を実行し、試行把持回数と把持成功回数をリアルタイムで更新します。
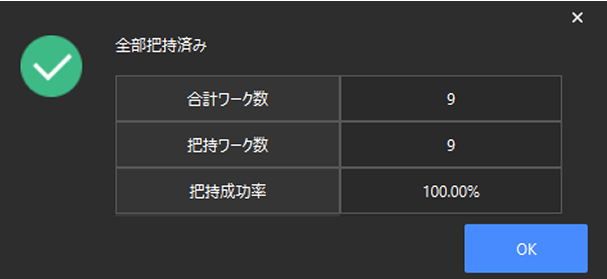
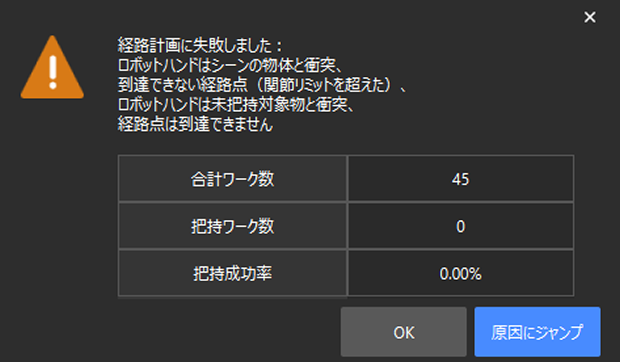
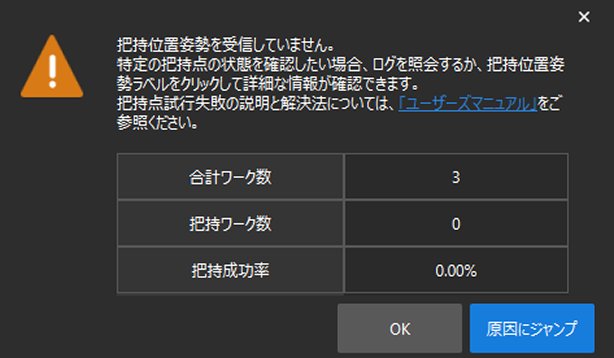
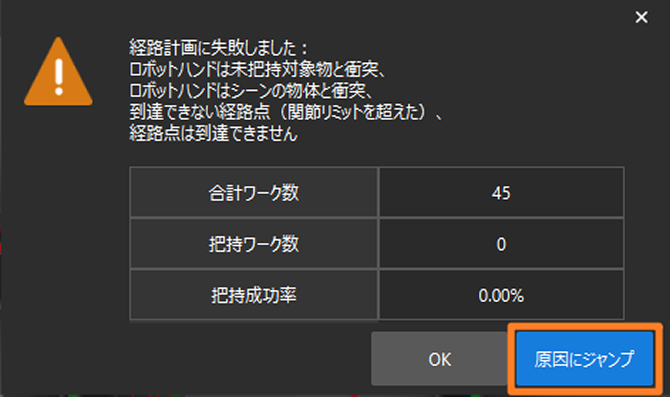
シミュレーションが自動的に完了した後、全把持の成否に応じて以下のいずれかのメッセージが表示されます。
把持の動きを確認する場合は、コンテナ切り替え、スライダー、フレーム数調整機能を使用して、さまざまな量のコンテナの把持効果を確認したり、フレームごとに全体の把持フローを再生したりできます。
把持情報統計
把持情報統計は、過去のシミュレーションの詳細な結果と失敗原因を表示し、把持パフォーマンスの定量分析を可能にします。
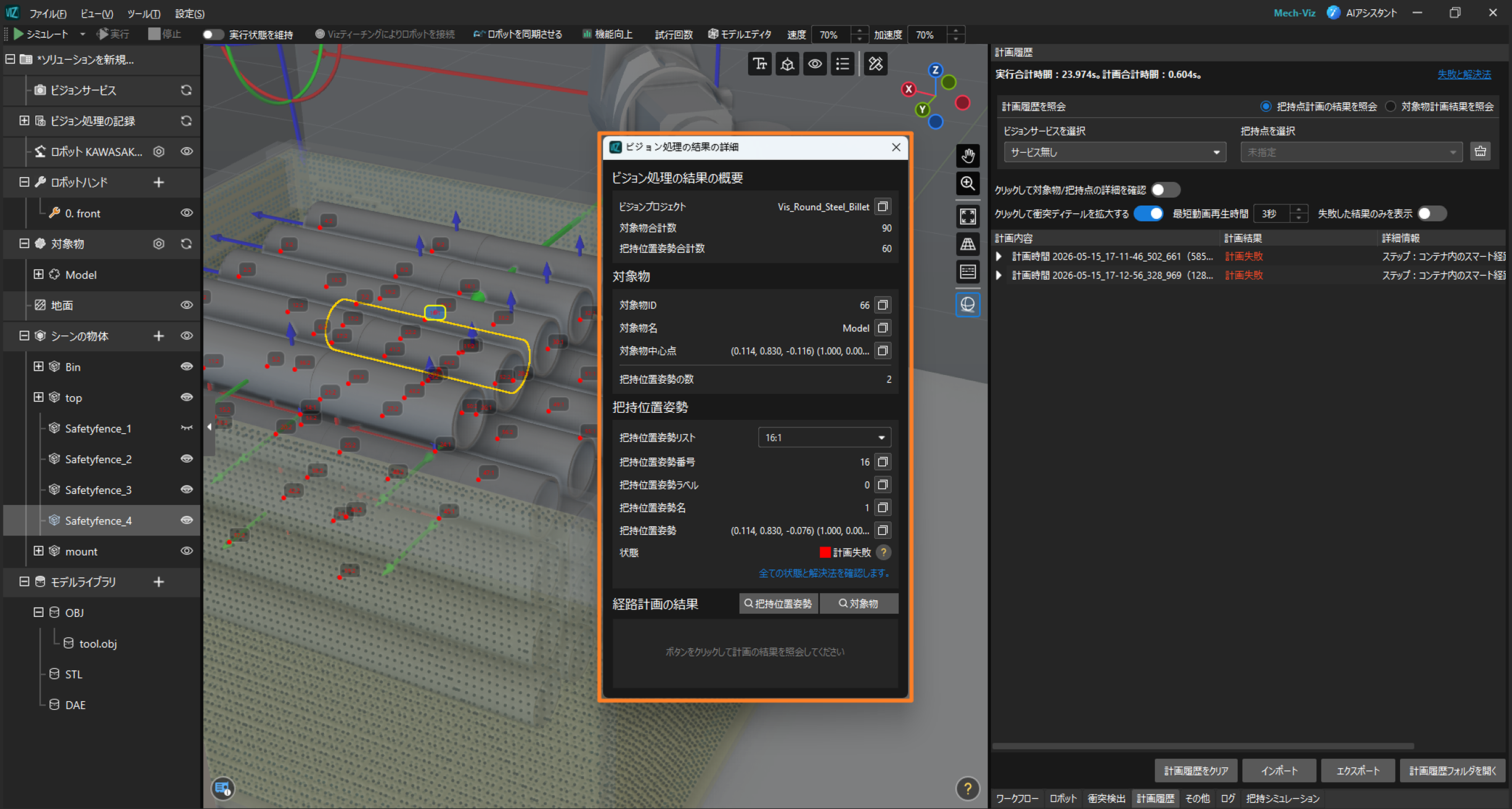
把持情報統計ボタンをクリックすると、統計結果ウィンドウが表示されます。その中で、NCの原因は把持戦略を最適化する根拠となります。頻繁に発生する失敗タイプに注目すべきです。
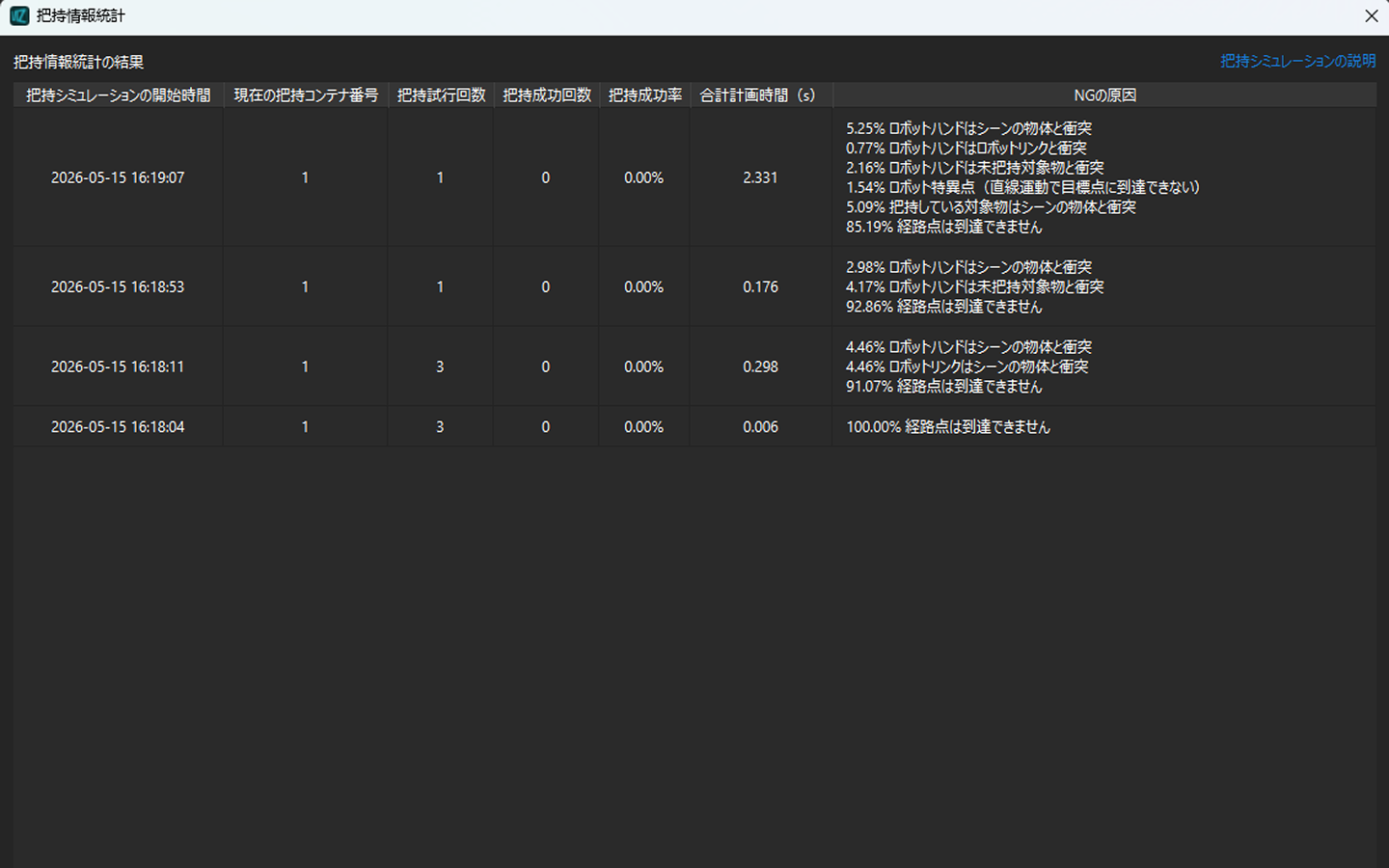
計画の失敗の原因となった具体的な箇所や対象物を特定するには、計画履歴やログパネルを確認して詳細な分析を行ってください。
| 計画に失敗した対象物のみが計画履歴に記録され、計画に成功した対象物は記録されません。 把持失敗の際に表示されるウィンドウから計画履歴にジャンプし、対応する計画内容と結果を確認できます。 |
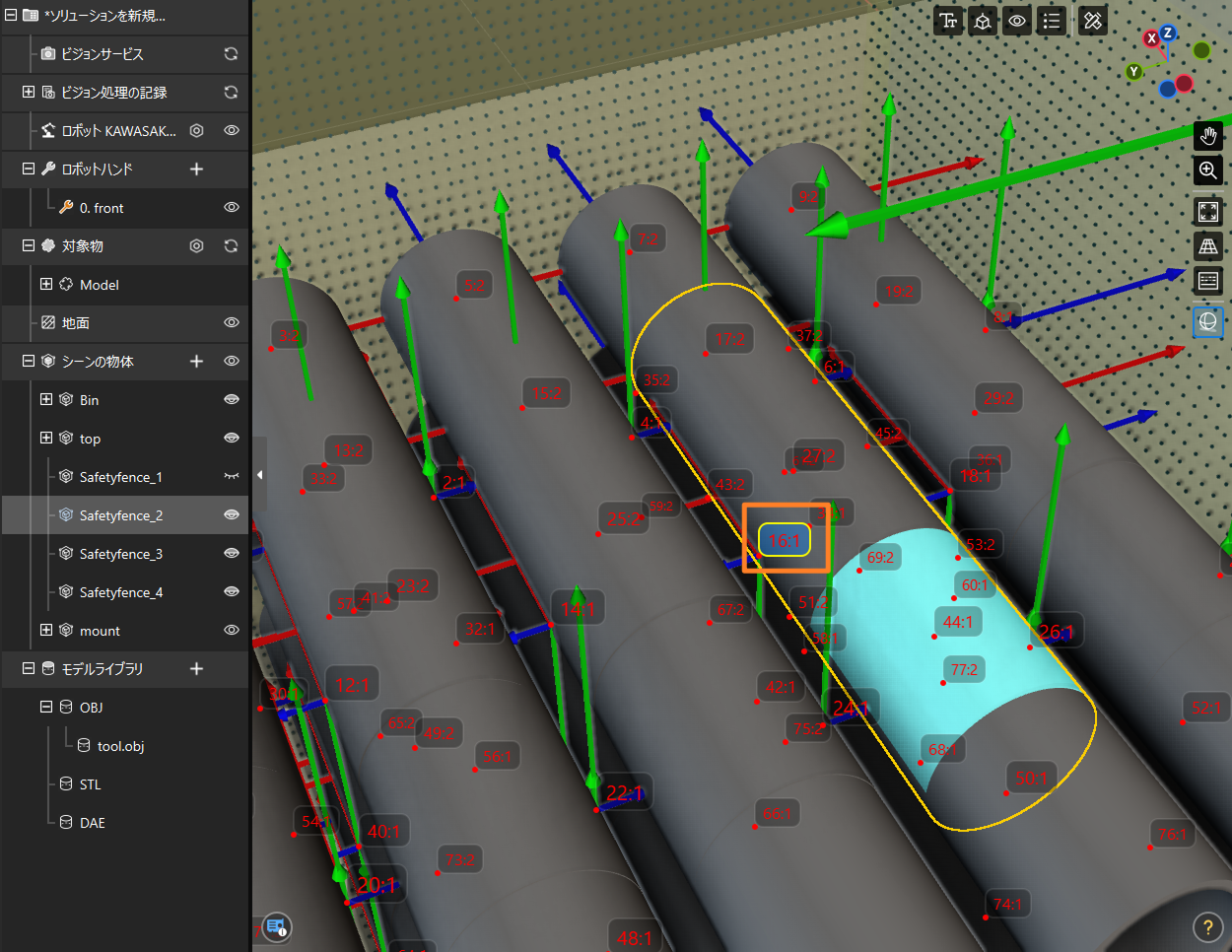
また、対象物上の把持位置姿勢をダブルクリックすることで、ビジョンポイントの詳細を確認できます。「ビジョン処理の結果の詳細」ウィンドウで、経路計画の結果内の把持位置姿勢と対象物をクリックすると、計画状態を確認でき、計画履歴にジャンプしてトラブルシューティングを行います。