複数把持のパレタイジング
機能
目標パレットパターンと供給された箱の姿勢に応じて複数把持の戦略を算出し、パレタイジングの効率を改善できます。このステップはパレットパターンを生成しません。パレットパターン情報を取得するためにパラメータを設定してパレットパターンを生成するステップを選択します。このステップを使用してパレタイジングの経路を生成して複数把持戦略を算出します。
使用シーン
ほとんどのパレタイジングシーンに適用されます。
| サンプルプロジェクトを提供しますのでご利用いただけます。ソフトウェアのファイル > 新規作成 > サンプルプロジェクト > 箱のパレタイジング > 複数把持 をクリックしてサンプルプロジェクトを使用します。 |
パラメータの説明
移動ステップの共通パラメータ
移動目標点を送信
デフォルトではチェックが入っています。相手側(ロボットなど)に現在の位置姿勢を送信します。チェックを外すと、現在の経路点を送信しませんが、計画する経路に残ります。
移動コマンドの後の非移動コマンドをスムーズに実行することを試行
デフォルトではチェックが外れており、 移動ステップ の間にビジョン処理による認識、DO を設定、DI をチェックなどの非移動ステップを接続すると、経路点の送信を中断し、ロボット実機動作中に一時中止することがあります。
チェックを入れると、現在のステップの実行終了を待たずに次のステップを実行できます。これにより、ロボットがよりスムーズに動作します。ただし、ステップが途中で終了する可能性があります。
ステップが途中で終了する原因とは
Mech-Viz 実行中、ロボットに同時に複数の経路点を送信しますが、最後の経路点が現在のロボットの関節角度と一致しているかのみを判断します。一致していると判断したら、ロボットが最後の経路点に到着していると見なします。
例えば、10 の移動ステップがある経路では、移動ステップ 5 の位置姿勢は最後のステップの位置姿勢とは同じとします。ロボット移動速度が遅くいと、5つ目の経路点に到着した後現在の関節角度を Mech-Viz に送信します。5つ目の移動ステップは最後の移動ステップとは、位置姿勢が同じなので Mech-Viz はロボットが全ての経路点に移動したと判断してコマンド実行が途中で終了する可能性があります。
配置された対象物との衝突を検出しない
衝突検出パネルの対象物衝突検出を有効にした場合、このオプションをチェックするとロボットとロボットハンド、配置済み対象物の衝突を検出しません。衝突の誤検出を回避するために、把持/配置が配置に設定されたステップの後に続く移動ステップではこのステップをチェックします。
例
吸盤の TCP は吸盤の表面ではなく、モデル内部にあるのは一般的です。箱を把持する時に、吸盤のモデルと箱モデルとは重なり合うことになります。しかし、ソフトウェアはロボットハンドと把持済み対象物との衝突を検出しないので把持しているときに衝突発生のメッセージは出てきません。箱を配置した後、その箱のモデルはシーンのモデルになり、ロボットハンドと箱のモデル(シーンのモデルとして)の衝突を検出してメッセージを表示します。この場合、タスクを完了できません。
これをチェックするとロボットやロボットハンドと配置済み対象物モデルとの衝突を検出しないので上記の問題を解決できます。
点群との衝突検出モード
通常、自動に設定します。このモードでは、衝突検出パネルの点群衝突検出設定内容が直接適用されます。ロボットが把持してから配置するまでの移動ステップについては、検出に設定します。
自動 |
デフォルト。衝突モデルパネルの点群衝突検出をオンにすると、「ビジョン処理による移動」ステップと「ビジョン処理による移動」に依存する「相対移動」ステップにだけ点群衝突検出を実行し、その他の移動ステップには実行しない |
検出しない |
ステップの点群衝突をいずれも検出しない |
検出 |
ステップの点群衝突を全部検出する |
対象物の対称性を使用しない
このパラメータは、移動ステップの目標点タイプが対象物位置姿勢に設定された場合にのみ使用できます。
ここの対称性は、ワークライブラリで衝突モデルを設定する時に事前に設定した把持されている対象物の回転対称性です。
無し |
初期値。対称性を無効にしない |
Z軸 |
Z 軸を中心とする対称性だけを無視しない |
XY軸 |
XY 軸を中心とする対称性だけを無視しない |
全て |
物体の対称性を使用しないように設定すると、ロボットが物体の位置姿勢に正確に到達して対象物を配置しない |
| 移動ステップをワーク配置に使用するとき、回転対称性を使用するとワーク配置位置の一致性を保証できません。ワークの配置姿勢を指定したい場合に全てのワーク対称性を無視してください。 |
計画が失敗した時の出口
チェックすると、計画に失敗出口が追加されます。
現在のステップの経路計画が成功すると、ワークフローは成功出口から実行します。失敗すると、ワークフローは計画のに失敗出口から実行します。複数の計画失敗出口がある移動ステップがあるワークフローは、最初の移動ステップの計画失敗出口から実行します。
把持された対象物との衝突検出モード
設定する前に、衝突検出パネルで対象物衝突検出を有効にしてください。
| 衝突検出を有効にしなければ衝突のリスクが高まるので注意が必要です。 |
シーンの物体との衝突を検出しない
チェックすると把持済み対象物とシーンの物体との衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
ロボットとの衝突を検出しない
チェックすると把持済み対象物とロボットとの衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
点群との衝突を検出しない
衝突検出パネルで点群衝突検出を有効にしたままこのオプションをチェックすると、把持済み対象物と点群との衝突を検出せず、衝突検出のための計算が削減され、経路計画の速度が向上します。
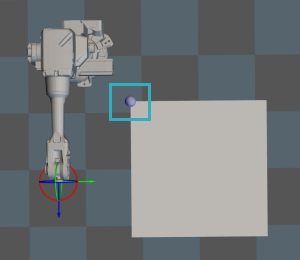
優先コーナー
パレットのどのコーナーから配置するかを決定します。パレットの姿勢が変わると、優先コーナーも変更されます。
| パラメータ | 説明 | イメージ図 |
|---|---|---|
OO |
ロボット座標系原点にもっとも近いコーナー |
|
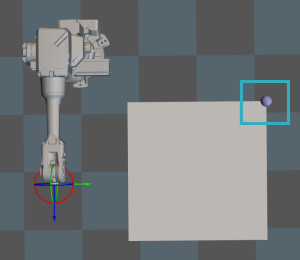
OY |
OO コーナーを基準に、ロボット座標系の Y 方向にあるコーナー |
|
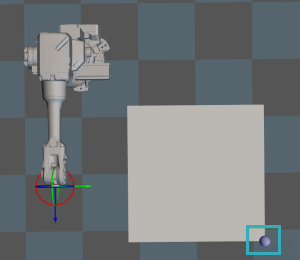
XY |
OO コーナーを基準に、ロボット座標系の Y 方向と X 方向にあるコーナー |
|
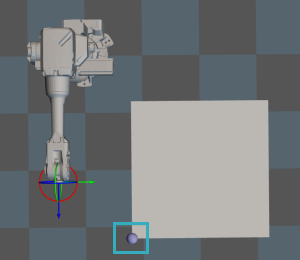
XO |
OO コーナーを基準に、ロボット座標系の X 方向にあるコーナー |
|
| このコーナーは、パレットが回転していない時に指定されました。 |
マッチング誤差のしきい値
組合わせられた箱と配置する位置をマッチングする時に XY 平面に置ける位置の誤差のしきい値。 箱の目標位置との偏差がこのしきい値を超えた時にマッチング失敗と判断します。簡単に言えば、平面座標の最大偏差の許容値を表します。
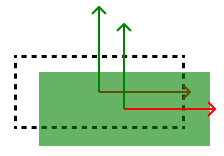
(緑の長方形は箱、断線は目標位置)
パレタイジング記録の保存と読み込み
オンにすると現在の進捗を記録し、継続パレタイジングに役立ちます。パレットパータン情報のファイルパスで JSON ファイルを選択するとパレットパターンの情報はこのファイルに記録されます。
オフラインパレットを選択
このステップはパレットパターンを生成しません。ほかのステップ(例えば事前計画パレットパターンやカスタマイズパレットパターン、混載パレタイジング)に依存します。
他のパレタイジングステップを配置してパレットパターンを設定してください。クリックメニューから使用したいパレット情報を提供するステップを選択すればいいです。

基本的な移動設定
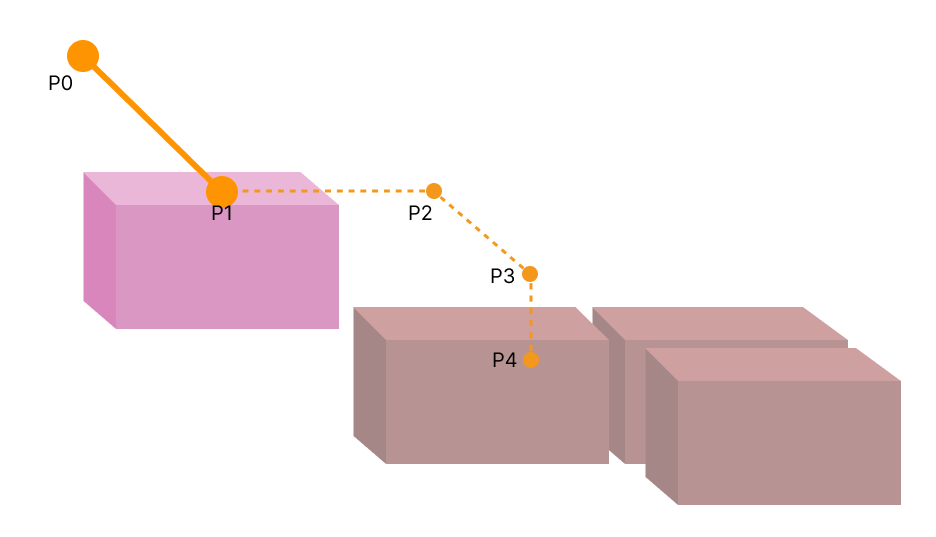
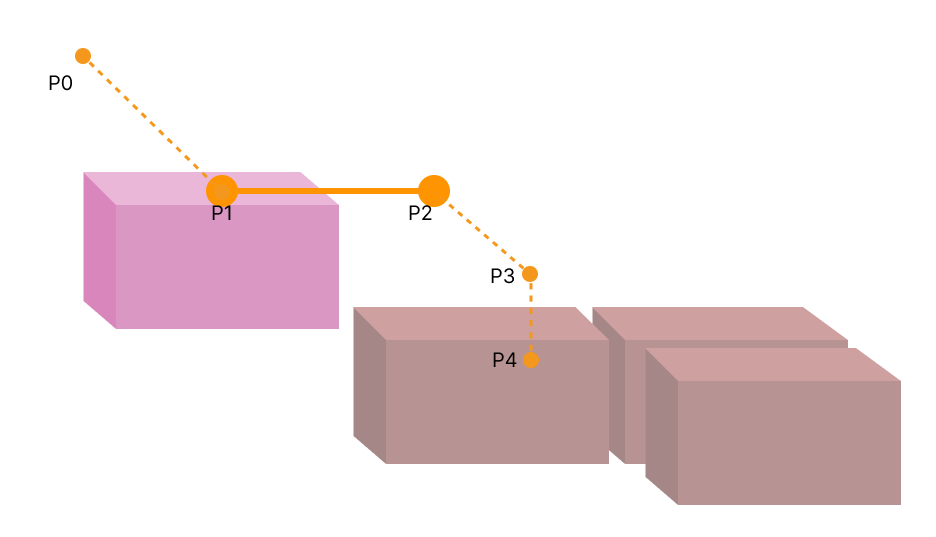
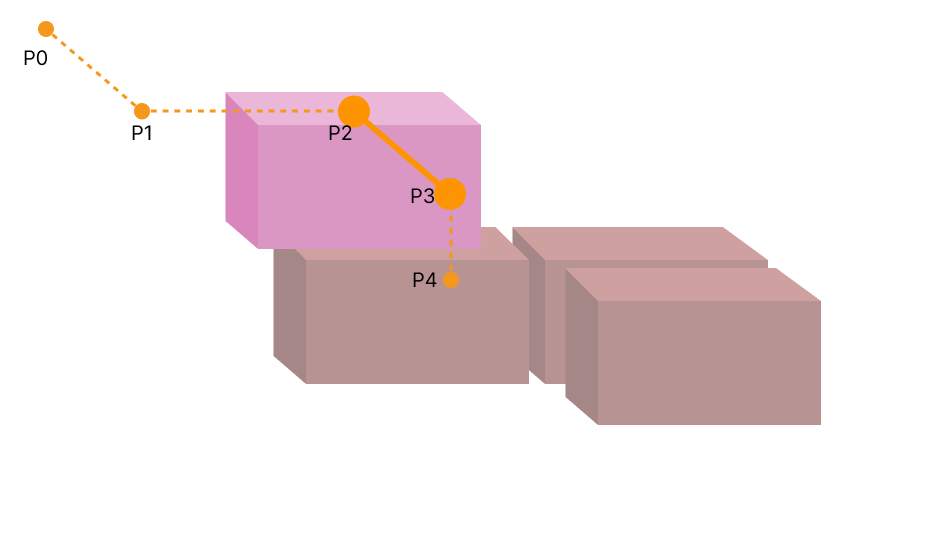
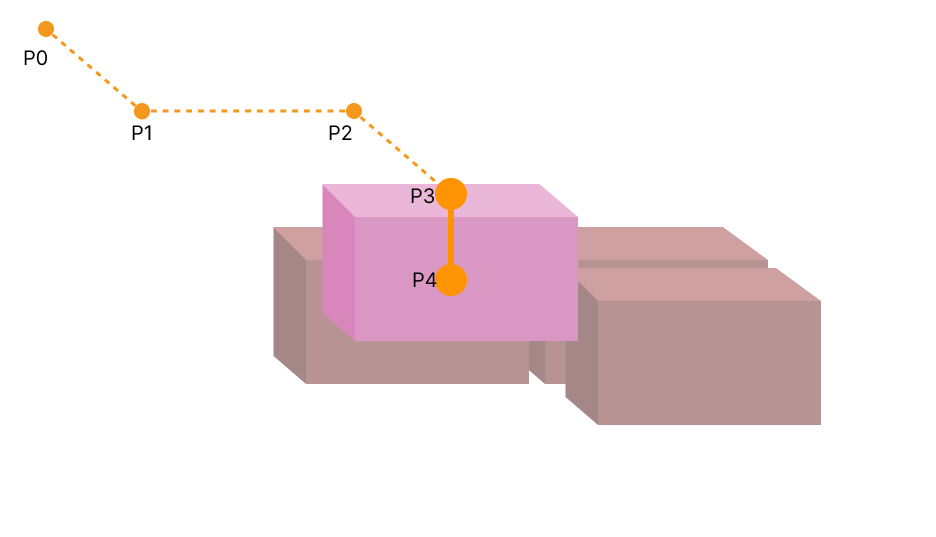
箱を配置する時の経路:
|
|
|
|
-
P0:基準点、P1:中間点、P2:進入点、P3:調整点、P4:配置点。
|
通常、パレタイジング作業では4つのポイント(P1、P2、P3、P4)を計画します。P0(基準点)は計画不要です。 |
-
P0-P1:中間段階、P1-P2:進入段階、P2-P3:調整段階、P3-P4:配置段階。
運動タイプ
関節運動 |
ロボットが円弧に沿って走行します。よりスムーズな走行ができ、特異点を回避することが可能。
|
直線運動 |
ロボットが直線に沿って走行します。
|
特異点回避
運動タイプに直線運動を選択した場合、特異点回避機能を有効にすると複数区間のロボット関節運動を直線運動に近似させることによって、特異点を一定程度回避できます。
パラメータ設定
| 移動区間数の制限 | 固定 | 制限なし |
|---|---|---|
機能 |
ユーザー指定の区間数の関節運動を用いて直線運動を近似します。 |
直線運動を近似するために必要な区間数を自動的に計算します。 |
メリット |
|
|
デメリット |
|
|
| パラメータ | 説明 |
|---|---|
移動区間数 |
移動区間数の制限を固定に設定する場合、ユーザーがこのパラメータの値を調整することで関節運動の区間数を指定します。 |
位置偏差の上限 |
複数の関節運動による新経路が、元の直線運動経路から外れる距離の最大許容値を指定します。 位置偏差の上限の値を大きくするほど、特異点回避の成功率は高くなりますが、実際の移動経路は直線との近似度は低くなります。 |
角度偏差の上限 |
複数の関節運動による新経路が、元の直線運動経路から外れる角度の最大許容値を指定します。 角度偏差の上限の値を大きくするほど、特異点回避の成功率は高くなりますが、実際の移動経路は直線との近似度は低くなります。 |
速度・加速度
速度・加速度パラメータは、ロボット動作のスピードを決定します。一般的に、加速度を速度より低く設定します。加速度が速度を上回ると、ロボット動作が不連続になります。
| 安定した把持を実行するように、ビジョン処理による移動ステップとその前後のステップの運動速度を低く設定することを推奨します。 |
ブレンド半径
通常、初期値のままで使用でき、調整は不要です。
-
レンド半径とは、回転する位置から目標点までの距離であり、大きいほどロボットの動きはスムーズになります。ロボットが狭いスペースで動作する場合、ブレンド半径を大きく設定する必要はありません。
-
ロボットの動作スペースが広く、障害物がなくて、かつ2つの経路の間に距離が遠い場合、ロボットがよりスムーズに動くように、ブレンド半径を大きく設定することができます。