その他
実行に関するパラメータやステップ収集、特異点検出、全体的関節制限を設定します。
実行設定
-
隣接する経路点をスキップ
隣接する二つの経路点の前の経路点だけをロボットに送信します。
-
デフォルトの対象物設定だけを使用
チェックすると、対象物のラベルを受信した場合でもデフォルトの対象物設定を適用します。
-
ロボットサービスのタイムアウト時間
Mech-Viz とロボットの通信のタイムアウト時間(移動ステップと「制御を移転」ステップを除く)。デフォルトでは 1000ms となります。
特異点検出
特異点検出の役割
ロボットが特異点付近に到達すると直線運動が実行できなくなり、ロボットのアラームが発生して現場の生産が中断されることがあります。特異点検出機能により、経路計画時に経路上の特異点を検知して回避し、ロボットがスムーズに動作できます。アラームや異常が発生したりすることを低減し、現場の生産効率を確保します。
特異点検出方法
Mech-Viz のその他パレットの特異点検出の「最大速度」、「減速比」、関節の角度範囲を設定することで特異点を検出します。特異点検出機能は以下の 4つの方法を提供します。
-
検出しない
-
各関節の速度を検出する
-
特定関節角度を検出する
-
各関節の速度と特定関節角度を検出する
| 特異点検出は、直線運動に設定された移動ステップにのみ機能します。 |
各関節の速度を検出する
-
説明
ロボットの関節の移動速度が最大速度の設定値より速い場合、Mech-Viz は対応する移動ステップの速度を減速比の設定値通りに減速してから再度検出します。減速後の速度が最大速度より遅いと、ロボットは対応するステップを実行する時に減速して移動します。減速しても最大速度より速いと、ソフトウェアはこの移動がロボットの特異点を引き起こすと判断します。
減速後の速度=元の速度×減速比 -
設定方法
-
検出方法のドロップダウンリストに各関節の速度を検出するを選択します。
-
最大速度と減速比パラメータを設定します。
-
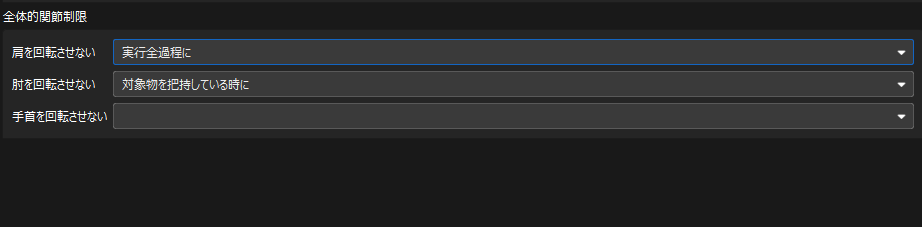
全体的関節制限
|
全体的関節制限の設定は移動ステップのパラメータ関節角度の制約条件が自由に設定され場合にのみ有効になります。 |
-
肩/肘/手首を回転させない
対象物を把持している時に と 実行全過程に が選択可能で、ロボットの不要な回転を低減します。
ロボットの余計な回転を削減したい場合、肩を回転させないを実行全過程に、肘を回転させないを対象物を把持している時に、手首を回転させないを空のままに設定することを推奨します。
隣接する 2つの経路点の目標点タイプが異なっている時、手首を回転させないを設定したらさらに以下のように大きな回転を引き起こす可能性があります。
| 手首を回転させないを設定しない | 実行全過程に手首を回転させない |
|---|---|
|
|