その他
実行、ステップ収集、特異点、全体的関節制限などを設定できます。
実行設定
- ワークフローの実行進捗を見積もる(Move IDを返信できないロボット)
-
ロボットが Move ID を返信できず、短いタクトタイムを必要とする場合、この機能を使用します。Mech-Viz は現在のロボットの位置姿勢に基づいてワークフローの実行進捗を判断します。 ただ、この機能を使用すると、ワークフローにある隣接する移動ステップと非移動ステップの実行開始時間が間違う可能性があります。
- 隣接する経路点をスキップ
-
隣接する二つの経路点の前の経路点だけをロボットに送信します。
ステップ収集
- 移動ステップの最大収集数
-
経路計画に使用する移動ステップの最大数です。プロジェクトに移動ステップの数が指定した値を超えると経路計画が中断されます。
- 非移動ステップの最大収集数
-
経路計画に使用する非移動ステップの最大数です。プロジェクトに非移動ステップの数が指定した値を超えると経路計画が中断されます。
特異点
ロボットが特異点の付近に到達すると直線運動を実行できない可能性があります。 事前にソフトウェアで特異点を回避するために設定する必要があります。
特異点検出方法 には二つのオプションがあります:
-
ロボットの各関節の速度を測定
関節運動の最大速度と減速比を設定することでロボットが特異点に移動する経路計画を回避します。
- 最大関節速度
-
関節運動の速度がこの値を超えると特異点と判断される可能性があります。
- 特異点の減速比
-
減速比がこの値を超えると特異点と判断される可能性があります。 減速比 = 減速後の速度(加速度)/設定した初期速度(加速度)。
-
ロボットの関節角度を測定
関節の角度の範囲を設定してロボットが特異点に移動する経路計画を回避します。
- 関節を選択
-
ロボットの関節を選択します。
- 角度の下限
-
関節角度がこの値より小さい場合、特異点と判断される可能性があります。
- 角度の上限
-
関節角度がこの値より大きい場合、特異点と判断される可能性があります。
全体的関節制限
|
移動ステップに対し、パラメータの「関節角度の制約条件」を「自動」に設定した場合、Mech-Viz では全体的関節制限の設定を適用します。「自動」以外に設定した場合は「関節角度の制約条件」の設定を適用します。 |
- 肩/肘/手首を回転させない
-
対象物を把持している時に と 実行全過程に が選択可能で、ロボットの不要な回転を低減します。
「肩/肘/手首を回転させない」 に設定しても不要な回転が発生する可能性があります。例えば:
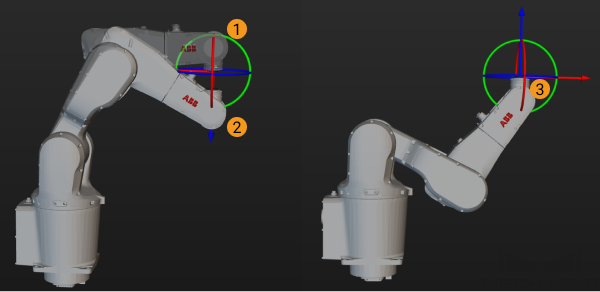
ロボットが 1 から 2 まで移動する場合、「手首を回転させない」ように設定するとより大きな回転が起き、ロボットが 3 の姿勢になるかもしれません。この場合、「肩を回転させない」と「肘を回転させない」だけ設定してください。