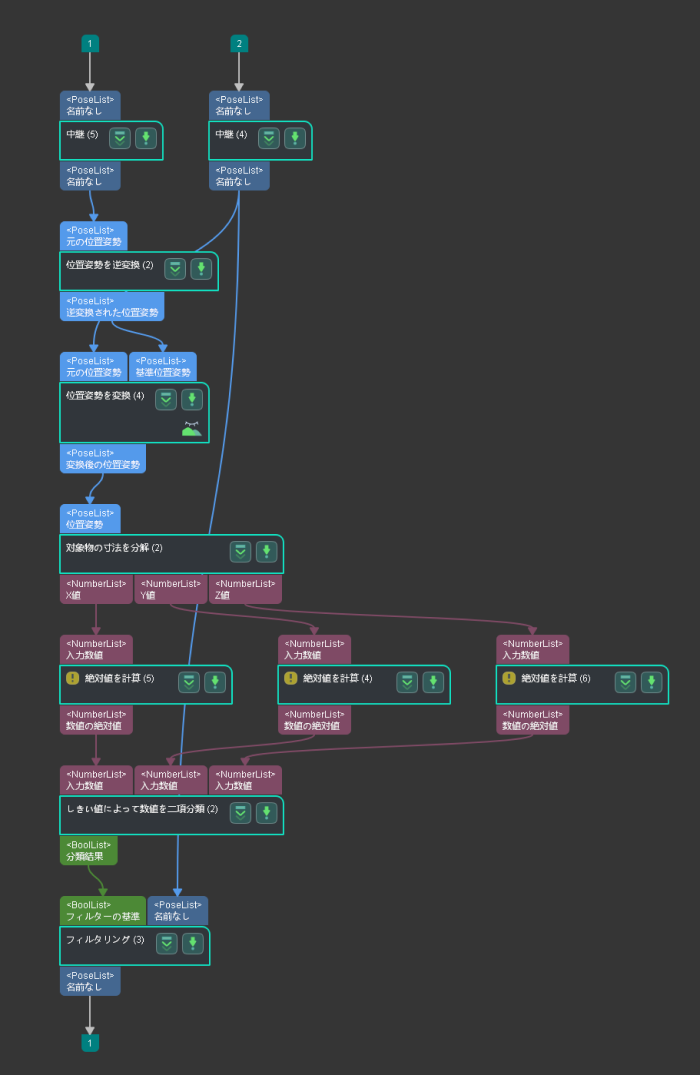
ROI以外の位置姿勢を除去 現在ご覧いただいているのは1.7.4 バージョンの内容です。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ 最新版をご利用される場合は、弊社ホームページよりダウンロードが可能です。ダウンロードにはパスワードが必要となりますので、サポート窓口までお問い合わせください。 ■ ご利用中のバージョンが分からない場合や、サポートが必要な場合はお気軽にサポート窓口までご連絡ください。 主な機能は、関心領域外の位置姿勢を除去し、その後の位置姿勢処理を高速化させることです。その構成を下図に示します。 各ステップの機能は以下の通りです。 位置姿勢を逆変換 により、関心領域の中心位置姿勢に対して逆変換を行います。 位置姿勢を変換 により、判断が必要な位置姿勢と逆変換後の関心領域の中心位置姿勢を入力し、判断が必要な位置姿勢の相対座標系を関心領域の中心位置姿勢の座標系に変換します。 対象物の寸法を分解 と 絶対値を計算 により、位置姿勢のXYZ座標の絶対値を取得します。 しきい値によって数値を二項分類 により、関心領域を設定し、XYZの絶対値が関心領域にあるかどうかを判断します。 フィルタリング により、関心領域外の位置姿勢を除去します。 この情報は役に立ちましたか? フィードバックを送信 ありがとうございます! ご意見・ご要望がございましたら、以下よりお寄せください: オンラインコミュニティ フィードバックフォーム 点の数が制限を超えた点群を除外 点群前処理