把持位置姿勢をソート
機能
位置姿勢をカメラ座標系からロボット座標系に変換し、指定した基準で位置姿勢をソートし、それを複数の把持位置姿勢にマッピングします。
-
入力:ソートする位置姿勢リスト。
-
出力:把持位置姿勢リスト、位置姿勢の分類ラベル、位置姿勢オフセット、対象物のインデックス。
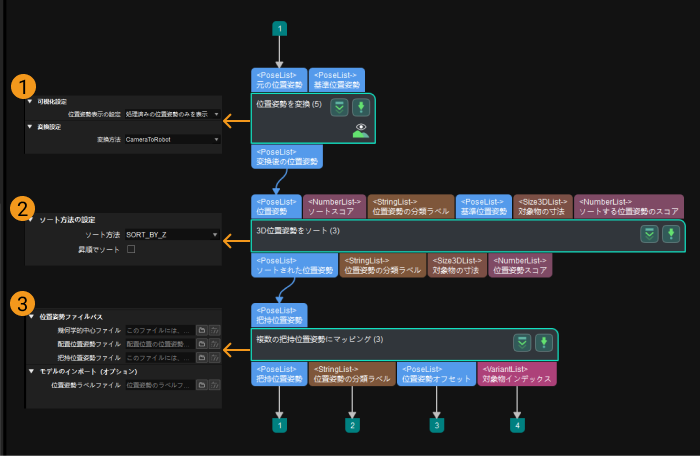
ステップ組合せの構成を下図に示します。
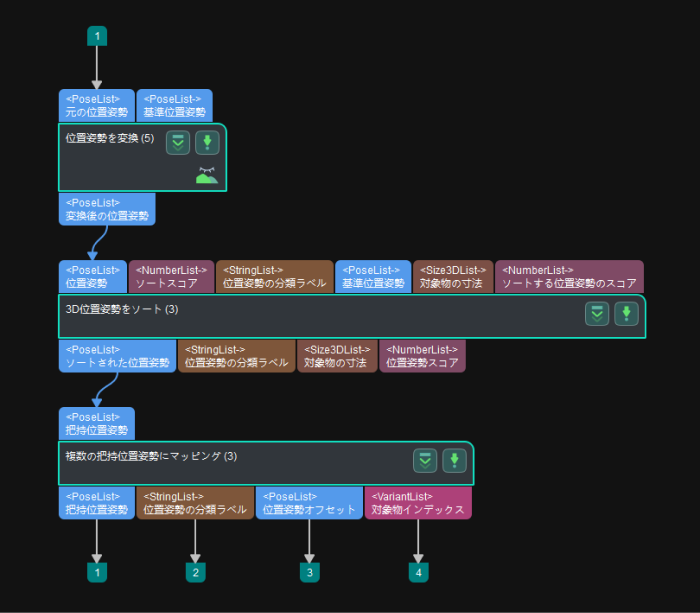
各ステップの機能は以下の通りです。
位置姿勢を変換 により、把持位置姿勢を入力し、ロボットが把持位置姿勢を読み込むために、その座標系をロボット座標系に変換します。
3D位置姿勢をソート により、座標系変換後の把持位置姿勢を入力し、指定した基準で把持位置姿勢をソートします。例えば、位置姿勢のXで降順にソート、ソートのスコアで昇順にソートなど。
複数の把持位置姿勢にマッピング により、ソート後の把持位置姿勢を入力し、同じワークの異なる把持位置姿勢を計算して、ワークの把持率を向上させます。