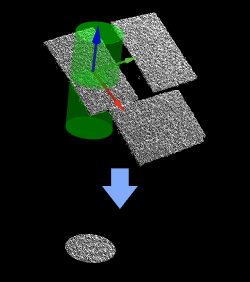
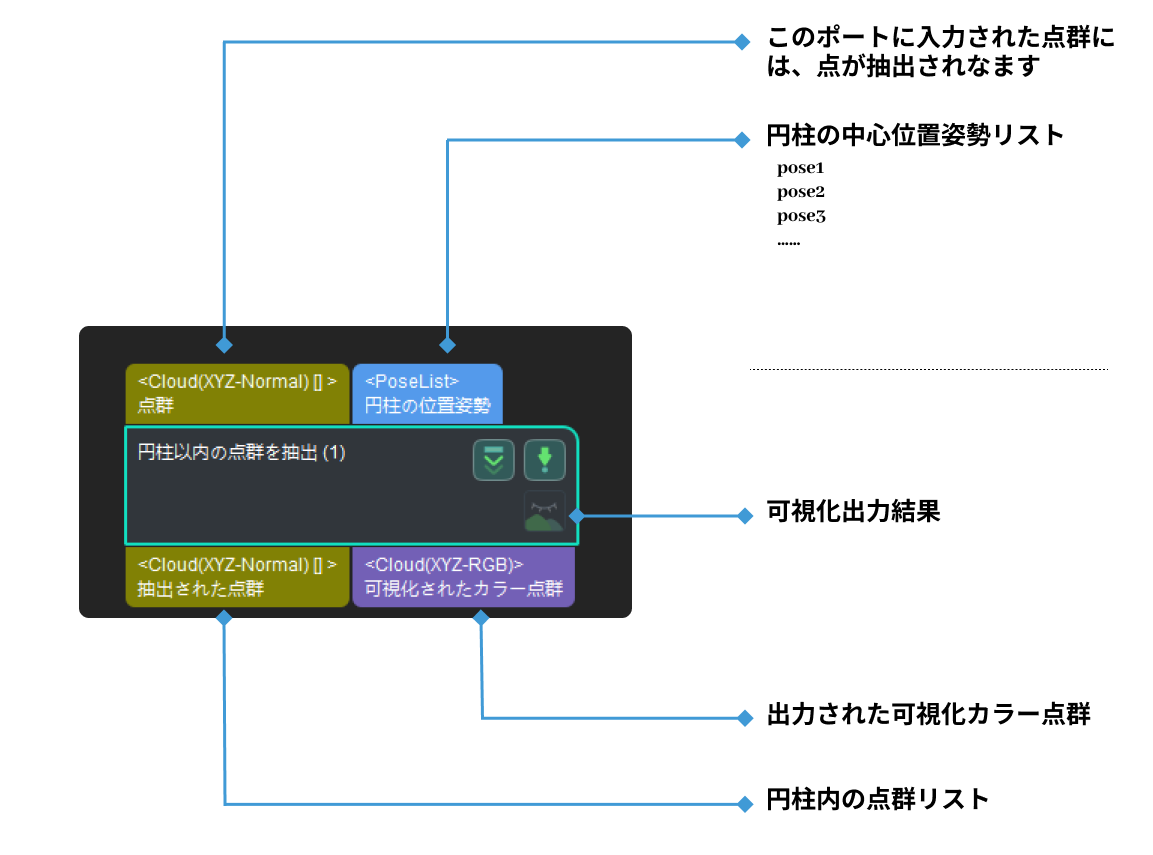
円柱以内の点群を抽出
パラメータの説明
- 形状タイプ
-
初期値:中空円柱。
オプション:円柱、中空円柱、扇形の柱。
調整説明:異なるシーンのニーズに応じて、異なる形状の点群を抽出できます。形状を選択すると、指定した形状内の3D点群が抽出されます。
Z方向のパラメータ
- 最小Z値
-
初期値:-100.000mm
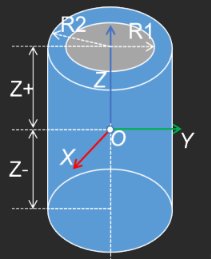
調整説明:これはZ軸における最小座標(ミリメートル単位)で、下図の Z- に対応します。単位はミリメートル(mm)です。
- 最大Z値
-
初期値:100.000mm
調整説明:これはZ軸における最大座標で、下図の Z に対応します。単位はミリメートル(mm)です。
中空円柱と扇形の柱の半径のパラメータ
- 内円半径
-
初期値:50.000mm
調整説明:XY平面の最小距離で、上図の R1 に対応します。単位はミリメートル(mm)です。このパラメータを 0 に設定すれば、円柱体を取得できます。
- 外円半径
-
初期値:100.000mm
調整説明:XY平面の最大距離で、上図の R2 に対応します。単位はミリメートル(mm)です。
扇形の角度のパラメータ
形状のタイプ を 扇形の柱 に設定すれば、以下の2つのパラメータは有効になり、扇形の形状を設定できます。
- 開始角度
-
初期値:-180°
調整説明:このパラメータは、XY平面上における扇形の開始角度です。
- 終了角度
-
初期値:180°
調整説明:このパラメータは、XY平面上における扇形の終了角度です。
入力点群の使用方法設定
- 点群の中心によって物体が円柱内にあるかどうかを判断
-
初期値:チェックを入れない。
調整説明:チェックを入れると、対象点群の中心が円柱内にあるかどうかをチェックするために使用されます。それ以外の場合はチェックされません。
- 入力点群の使用方式
-
初期値:All
オプション:All、FirstOnly
調整説明:異なるパラメータの値を選択することで、異なる入力点群の使用方法を切り替えることができます。