仮想ロボットを動かしてみよう
まず、簡単な経路を作って仮想ロボットを動かしてみましょう! 「経路」は「経路点」によって指定されるので、ロボットの動作経路を作成するために「経路点」をいくつか設定すればいいです。
-
詳しく説明します。
-
手順
-
Mech-Viz を起動し、プロジェクトを新規作成します。ロボットをいずれか選択してください。
-
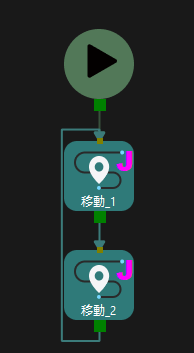
ステップライブラリから「移動」ステップを編集エリアにドラッグします。
-
この「移動」ステップを選択して右のパラメータパレットを見てください。下の「関節角度」は、今の仮想ロボットの各関節の角度数値が表示されます。いずれかの数値を変更すれば仮想ロボットの姿勢が変わります。変更した位置姿勢は経路点として使用できます。
-
「スタート」と「移動」ステップを接続し、シミュレートをクリックします。すると仮想ロボットが前の手順に変更した位置姿勢に移動します。
-
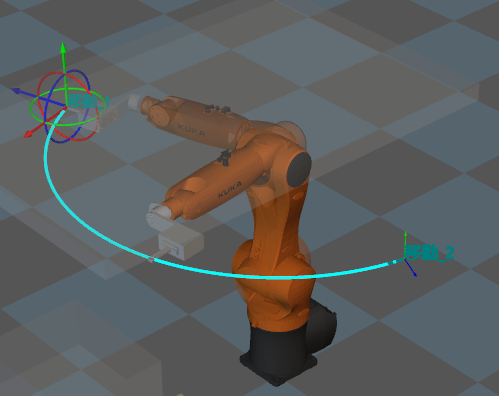
続けて経路点を設定してみましょう。二つ目の「移動」ステップをドラッグして関節角度の数値を変更します。「移動_1」の出口と「移動_2」の入口を接続してからシミュレートをクリックします。すると仮想ロボットが前の経路点から新しい経路点に移動します。
-
「移動_2」の出口と「移動_1」の入口を接続してからシミュレートをクリックします。すると仮想ロボットがこの 2 点の間を行き来します。停止をクリックすると仮想ロボットの動作が止まります。
ワークフロー
シミュレーション
-
これでロボット経路計画の第一歩を踏み出しました!