深度画像を点群に変換
機能
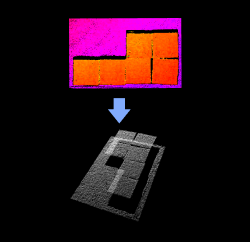
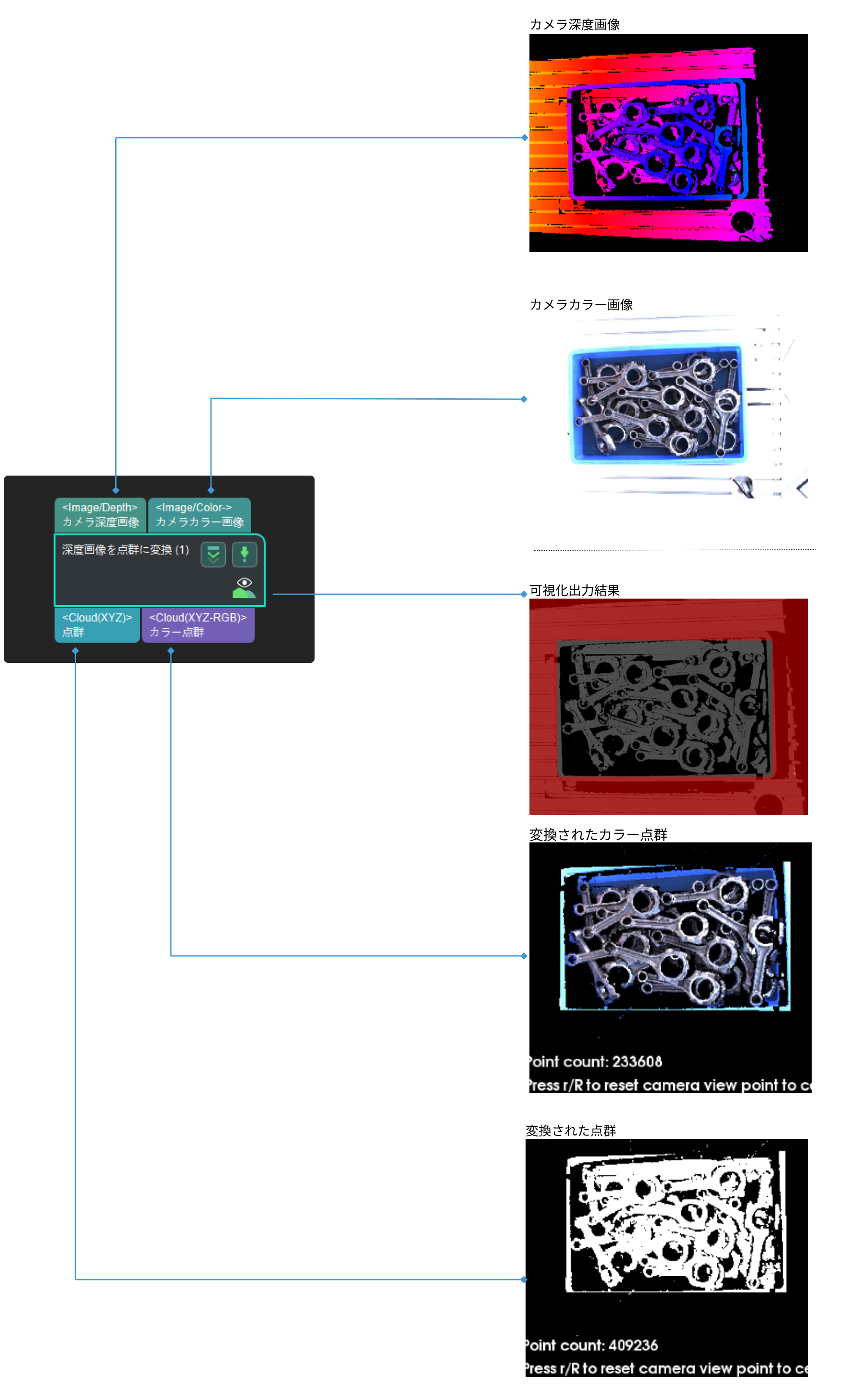
このステップは、深度画像とカラー画像を使用して点群を生成できます。
|
カメラから画像を取得 も点群とカラー点群を直接的に出力できます。しかし、プロジェクトの実行速度を上げるために、一般的に 深度画像を点群に変換 ステップを使用して点群とカラー点群を取得します。 深度画像を点群に変換 を使用してROIを設定し、不要な点群を回避して実行の速度を向上させます。 |
パラメータの説明
- 深度画像のROIファイル
-
調整説明:深度画像の関心領域を抽出します。
調整の例:異なるROIを設定して効果を対比します。
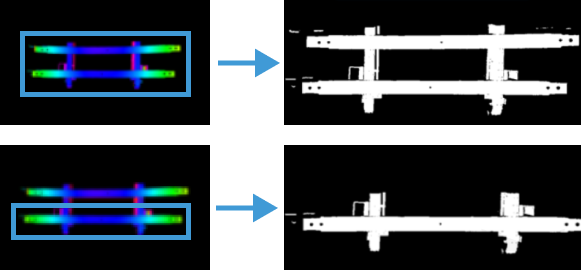
上図に示すように、左側は深度画像の関心領域で、右側は出力された点群です。
調整の手順:
-
深度画像のROIファイル の右側にある 2D ROIを設定 ボタンをクリックして、 ROI設定 画面に入ります。
-
画面でROIを設定します。
-
確認 をクリックして設定を保存します。同時に、プロジェクトのルートディレクトリに depth_image_roi.json ファイルは生成されます。
-
背景除去設定
- 深度画像による背景を除去
-
初期値:チェックを入れない。 調整説明: 深度画像による背景を除去 にチェックを入れてから以下のパラメータを設定可能です。
- 深度背景画像のファイル名
-
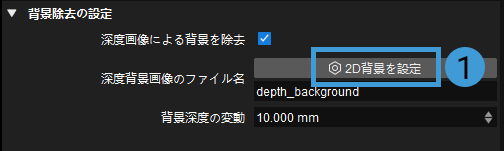
調整手順:背景深度画像設定の手順は以下の通りです。
深度画像背景のファイル名 の右側にある 2D背景を設定 ボタンをクリックして、 背景設定 画面に入ります。
··· をクリックして事前に準備された背景画像を選択します。メッセージで 背景画像ファイルの読み込みに成功しました。 が表示されたら、 確認 をクリックします。

|
実際のカメラを接続して、現場で背景画像を取得することもできます。 |
- 背景深度の変動
-
初期値:10.000 mm 調整説明:深度画像と背景深度画像を入力して対比します。深度の差が変動範囲内にある背景は除去されます。 調整の例:下図では、1は背景が除去されなく、2 、3 、4は背景が除去され、背景深度の変動をそれぞれ1mm、10mm、30mmに設定した場合の調整効果は下図に示します。
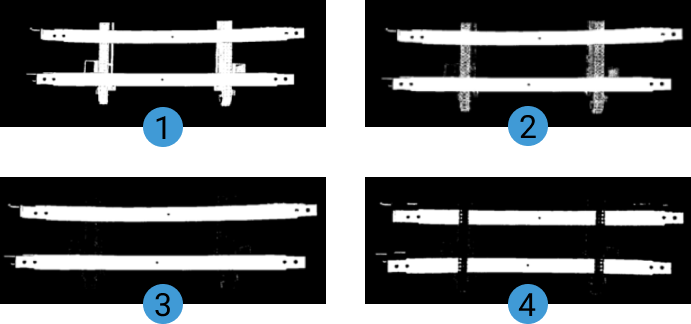
背景深度の変動を小さく設定したら、背景は全部除去できません。背景深度の変動を大きく設定したら、部品の点群も除去されてしまいます。したがって、現場の状況に応じて背景深度の変動を適切に設定する必要があります。通常の場合は 10mm に設定することを推奨します。