ラインスキャンレーザーカメラ
機能
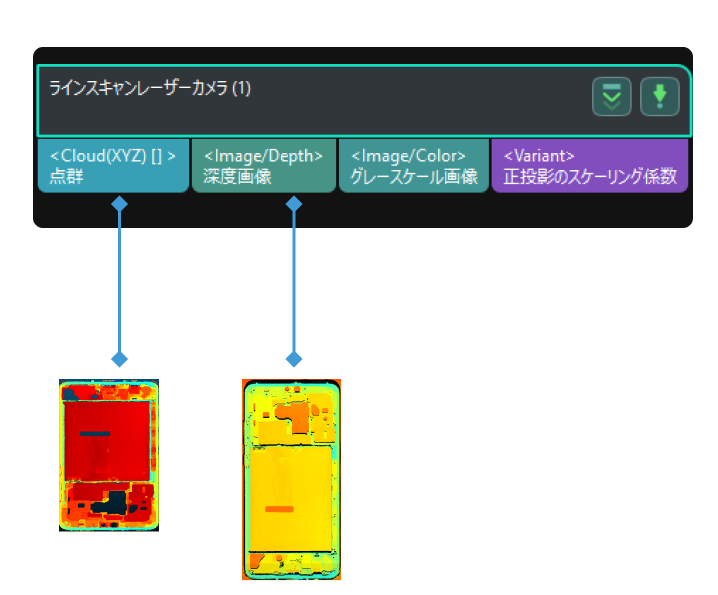
Mech-Visionを使ってレーザースキャナを制御してデータを取得します。
|
このステップは現在、 Mech-Eye 3D ラインレーザープロファイラー と SSZN製の3Dカメラ のみ対応しています。 |
使用シーン
このステップは、一般的にビジョンプロジェクトの開始入力として使用され、データはラインスキャンレーザーカメラで取得されます。3C、新エネルギー、自動車、家電などの高精度な検査・測定用途に適しています。
パラメータの調整説明
LNXCamera(初期値) 、SSZNCamera の2種類があります。
-
Mech-Eye 3Dラインレーザープロファイラーを使用する場合、 LNXCamera を選択してください。
-
SSZN製の3Dカメラを使用する場合、 SSZNCamera を選択してください。
LNXCamera
3DラインレーザープロファイラーLNXシリーズを使用する場合、以下のパラメータを調整する必要があります。
- IP
-
パラメータ説明:このパラメータは、接続するデバイスのIPアドレスを設定するために使用されます。
調整説明: エディタを開く をクリックしてIPアドレスを設定します。デバイスを選択し、ダブルクリックして接続します。
- パラメータグループを使用
-
パラメータ説明:このパラメータを有効にすると、パラメータグループを読み込むことができます。
初期値:無効
- パラメータグループ
-
パラメータ説明:このパラメータは、必要なパラメータグループを選択するために使用されます。
トリガー設定
- 等価パルス
-
パラメータ説明:このパラメータは、エンコーダから受信した信号の解像度、つまりエンコーダの2つのパルス信号間の距離をミリメートル(mm)単位で表示します。
初期値:0.004mm
- モーションモード
-
パラメータ説明:このパラメータは、撮影される対象物がカメラに対する運動方向を選択するために使用されます。
オプション:
-
一方向運動:初期値です。X方向の測定範囲が認識する対象物をカバーできる場合に推奨します。
-
往復運動:一方向運動が要件を満たしていない場合に推奨します。
-
一般的な適用シーンは以下の通りです。
-
カメラがコンベアと同時に移動する場合に使用すると、効率を向上させます。
-
X方向の測定範囲が認識する対象物をカバーできない場合は、往復運動でスキャンし、スティッチングにより完全な深度データを出力します。
|
往復運動 は、Mech-Eye Viewerで コーディングモード が双方向の場合にのみ選択可能です。 |
- 横方向の移動距離
-
パラメータ説明:このパラメータは、コンベアまたはカメラが横方向に移動する距離(ミリメートル単位)を示します。
初期値:100mm
このパラメータは、 モーションモード を 往復運動 に設定した場合にのみ設定できます。
|
パラメータグループを使用 を有効にする場合、 トリガーソース と エンコーダトリガー間隔 の2つのパラメータを設定できません。 |
- トリガーソース
-
パラメータ説明:このパラメータは、取得のトリガー方式を指定するために使用されます。
オプション:
-
Encoder:初期値で、エンコーダでトリガーします。
-
Software:Mech-Eye Viewerソフトウェアでトリガーします。
-
- エンコーダトリガー間隔
-
パラメータ説明:このパラメータは、1行のデータを取得するために必要なエンコーダ信号を指定するために使用されます。
初期値:10
|
このパラメータは、トリガーソースを Encoder に設定した場合にのみ設定できます。 |
取得停止の条件
|
以下のいずれかの場合、取得を中止します。
|
- 最大取得時間
-
パラメータ説明:このパラメータは、最大取得時間(単位はミリ秒)をを設定するために使用されます。取得時間がこの値を超えると、取得は停止します。
初期値:5000ms
- 取得の制約条件
-
パラメータ説明:このパラメータは、取得の行数や移動距離を制限するために使用されます。
オプション:
移動距離
-
最大行数
初期値:移動距離。
-
- 移動距離
-
パラメータ説明:このパラメータは、Y方向における取得されたデータの長さ(ミリメートル単位)を示します。
調整説明:移動距離=期待される行数×トリガー間隔×等価パルス
初期値:100mm
このパラメータは、 取得の制約条件 を 移動距離 に設定した場合にのみ設定できます。
- 最大行数
-
パラメータ説明:このパラメータは、カメラ取得の最大行数を設定するために使用されます。最大行数に到達すると、取得は停止します。
初期値:30000
このパラメータは、 取得の制約条件 を 最大行数 に設定した場合にのみ設定できます。
露光設定
|
このパラメータは、 パラメータグループを使用 を有効にした場合に使用できません。 |
- 露光モード
-
パラメータ説明:このパラメータは、ラインスキャンカメラの露光モードを選択するために使用されます。
オプション:
-
Timed:固定露光、固定的な露光時間を使用してデータを取得します。このパラメータは、取得する対象物が同じタイプの場合に使用されます。
-
HDR:複数の露光時間を用いて露光効果を融合させるモードです。取得した対象物に、反射する対象物に反射しやすいものと反射しないものがある場合に使用されます。
-
- 露光時間
-
調整説明:調整する場合は、反射しやすい対象物は露光時間を短くし、反射しにくい対象物は露光時間を長くしてください。
|
このパラメータは、 露光モード を Timed に設定した場合にのみ設定できます。 |
- HDR露光時間1 / 2 / 3
-
調整説明:対象物の反射性に応じて露光時間を設定してください。
このパラメータは、 露光モード を HDR に設定した場合にのみ設定できます。
- 露光遅延
-
パラメータ説明:このパラメータは、露光の遅延時間(μs単位)を設定するために使用されます。トリガー信号が受信後、設定した時間を遅らせてから露光を開始します。
初期値:5μs
ROI設定
|
このパラメータは、 パラメータグループを使用 を有効にした場合に使用できません。 |
- Z方向のROI
-
パラメータ説明:このパラメータは、Z方向の関心領域を設定するために使用されます。
オプション:
-
画像全体の高さ:初期値で、Z方向の全体領域です。
-
画像高さの半分:Z方向の半分です。
-
画像高さの4分の1:Z方向の4分の1です。
-
画像高さの8分の1:Z方向の8分の1です。
-
画像高さの16分の1:Z方向の16分の1です。
-
SSZNCamera
SSZN製の3Dカメラを使用する場合、以下のパラメータを調整する必要があります。
- IP
-
パラメータ説明:このパラメータは、接続するデバイスのIPアドレスを設定するために使用されます。
調整説明: エディタを開く をクリックしてIPアドレスを設定します。デバイスを選択し、ダブルクリックして接続します。
- パラメータグループを使用
-
パラメータ説明:このパラメータを有効にすると、パラメータグループを読み込むことができます。
初期値:無効
- コンフィグファイル名
-
パラメータ説明:このパラメータは、JSON形式のパラメータグループを読み込むために使用されます。
|
パラメータファイルは、 パラメータグループを使用 を有効にする場合にのみ読み込むことができます。 |
トリガー設定
- 等価パルス
-
パラメータ説明:このパラメータは、エンコーダから受信した信号の解像度、つまりエンコーダの2つのパルス信号間の距離をミリメートル(mm)単位で表示します。
初期値:0.004mm
- モーションモード
-
パラメータ説明:このパラメータは、撮影される対象物がカメラに対する運動方向を選択するために使用されます。
オプション:
-
一方向運動:初期値です。X方向の測定範囲が認識する対象物をカバーできる場合に推奨します。
-
往復運動:一方向運動が要件を満たしていない場合に推奨します。
-
一般的な適用シーンは以下の通りです。
-
カメラがコンベアと同時に移動する場合に使用すると、効率を向上させます。
-
X方向の測定範囲が認識する対象物をカバーできない場合は、往復運動でスキャンし、スティッチングにより完全な深度データを出力します。
- 横方向の移動距離
-
パラメータ説明:このパラメータは、コンベアまたはカメラが横方向に移動する距離(ミリメートル単位)を示します。
初期値:100mm
このパラメータは、 モーションモード を 往復運動 に設定した場合にのみ設定できます。
- エンコーダトリガー間隔
-
パラメータ説明:このパラメータは、1行のデータを取得するために必要なエンコーダ信号を指定するために使用されます。
初期値:10
取得停止の条件
|
以下のいずれかの場合、取得を中止します。 |
-
取得時間が 最大取得時間 より大きい場合。
-
設定した 移動距離 に到達した場合。
-
設定した 取得行数 に到達した場合。
- 最大取得時間
-
パラメータ説明:このパラメータは、最大取得時間(単位はミリ秒)をを設定するために使用されます。取得時間がこの値を超えると、取得は停止します。
初期値:5000ms
- 取得の制約条件
-
パラメータ説明:このパラメータは、取得の行数や移動距離を制限するために使用されます。
オプション:
-
移動距離
-
最大行数
初期値:移動距離。
- 移動距離
-
パラメータ説明:このパラメータは、Y方向における取得されたデータの長さ(ミリメートル単位)を示します。
調整説明:移動距離=期待される行数×トリガー間隔×等価パルス
初期値:100mm
このパラメータは、 取得の制約条件 を 移動距離 に設定した場合にのみ設定できます。
- 最大行数
-
パラメータ説明:このパラメータは、カメラ取得の最大行数を設定するために使用されます。最大行数に到達すると、取得は停止します。
初期値:30000
このパラメータは、 取得の制約条件 を 最大行数 に設定した場合にのみ設定できます。