ビジョン処理による継続パレタイジング
機能
「ビジョン処理による認識」ステップによってパレットに配置された箱を確認し、事前計画したパレットパターンに基づいて続けてパレタイジングします。
| 「事前計画パレットパターン」、「カスタマイズのパレットパターン」、「スマートパレットパターン」ステップと合わせて使用します。「混載パレットパターン」と合わせて使用することはできません。 |
パラメータ
移動ステップの共通パラメータ
移動コマンドの後の非移動コマンドをスムーズに実行することを試行
デフォルトではチェックが外れており、 移動ステップ の間に「ビジョン処理による認識」、「DO を設定」、「DI をチェック」などの 非移動ステップ を接続すると、ロボット移動経路の計画を中断し、ロボット実機動作中に一時中止することがあります。 チェックを入れると現在のステップが完了しなくても続行することが可能です。これにより、ロボットがよりスムーズに動作します。ただし、ステップが途中で終了する可能性があります。
|
ステップが途中で終了する原因は何ですか? Mech-Viz 実行中、ロボットに同時に複数の位置姿勢を送信しますが、最後の位置姿勢が現在のロボットの関節角度と一致しているかのみを判断します。一致していると判断したら、ロボットが最後の位置に到達していると見なします。 例えば、10 の移動ステップがある経路では、移動ステップ 5 の位置姿勢は最後のステップの位置姿勢とは同じとします。ロボットが低速に動作し、移動ステップ 5 の位置に到達したらその位置の関節角度を Mech-Viz に送信します。経路では、移動ステップ 5 の位置姿勢は最後の移動ステップの位置姿勢とは同じなので、Mech-Viz はロボットの動作が完了したと判断して途中で実行を終了します。 |
配置された対象物との衝突を検出しない
デフォルトではチェックが外れていおり、配置された対象物との衝突を検出しません。チェックを入れると、ロボット本体・ロボットハンドと配置された対象物との衝突を検出します。
パレタイジングのシーンでは、以下の場合があります。
-
ロボットが段ボール箱を配置するときに配置済みの箱と軽く衝突する(箱の凹みや変形などが発生しない)ことがあります。Mech-Viz ではこのような衝突を検出したら別の配置位置を計画するためパレットが満杯になりません。
-
普通、吸盤を使用する場合、TCP を吸盤の表面でなく、モデル内部に設定するため、物体を吸着する時、吸盤と把持する箱のモデルと重なります(ソフトウェアでは吸盤と把持対象物との衝突を検出しない)。ロボットが箱を配置してから、把持された箱のモデルはシーンのモデルになり、吸盤がシーンの箱のモデルと衝突すると判断してメッセ―ジを表示してパレタイジングが続行できなくなります。
これをチェックするとロボット本体やロボットハンドと配置済み対象物モデルとの衝突を検出しないので上記の問題を解決できます。
点群との衝突検出モード
現場の状況に応じて設定してください。普通、デフォルトの 自動 を使用します。ロボットが物体を把持する前の移動ステップは、 チェックしない を選択し、把持した後の移動ステップを チェック を選択します。
| 自動 |
初期値。「ビジョン処理による移動」ステップと「ビジョン処理による移動」ステップに依存する「相対移動」の点群衝突だけを検出します。 |
| チェックしない |
移動ステップの点群衝突をいっさい検出しません。 |
| チェック |
全ての移動ステップの点群衝突を検出します。 |
| をオンにすれば、Mech-Viz は経路計画を行うときにロボットモデル、ツールモデルと点群との衝突を検出します。 普通、点群衝突の設定は、ロボットが把持を実行するときに把持対象物との衝突を検出するためです。空間内にノイズがあれば、ソフトウェアは対象物を把持する前の経路を計画するときに、ノイズがロボットモデル、ツールモデルと接触して点群との衝突が誤って判断されて経路計画の誤りが発生します。 |
対象物の対称性を使用しない
このパラメータは、 目標点タイプ が 対象物位置姿勢 の移動ステップ(目標点タイプが物体の位置姿勢の移動ステップ、パレタイジングステップなど)に対してのみ有効です。目標点のタイプが関節角度、TCP位置姿勢の移動ステップには無効です。
| 無し |
無し:初期値。対称性を無効にしません。 |
| Z 軸 |
Z 軸の対称性のみを使用しません。 |
| XY 軸 |
X、Y 軸の対称性のみを使用しません。 |
| 全て |
全ての対称性を使用しません。 |
物体の対称性を使用しないように設定すると、ロボットが物体の位置姿勢に正確に到達して対象物を配置します。
|
対象物を把持できない場合に の 回転対称 を設定します。 対象物に対称性がある場合、複数の候補位置姿勢があります。 Mech-Viz では対象物の把持を計画するときに、デフォルト位置姿勢が把持できない場合、候補位置姿勢を試行します。 物体対称位置姿勢と Mech-Vision によって出力された元位置姿勢とは一致しなければ、ロボットによる対象物の配置位置姿勢は一致しないことがあります。 |
ビジョンサービス名
「ビジョン処理による認識」ステップを選択します。 ビジョン処理による継続パレタイジング ステップはビジョンプロジェクトによってパレットに配置された箱を認識し、位置決めします。
ビジョン処理の結果は普通、2つの部分、認識した箱の位置姿勢 と 認識したパレットの位置姿勢 で構成されています。
認識したパレットの位置姿勢は必須ではありません。ビジョン処理の結果に認識したパレットの位置姿勢がない場合、指定したパレットパターンのパレット位置姿勢を使用します。
| パレットの実際の位置は設定したものと大きくずれている場合、ビジョンプロジェクトで認識した位置姿勢を使用してください。これはマッチングの精度を上げるためです。 |
ビジョン処理による結果を取得したあと、認識した箱の位置姿勢を指定したパレットパターンの箱の位置姿勢とマッチングします。ビジョン処理によるマッチング を調整できます。マッチングに失敗した場合、マッチングに失敗 出口から実行します。失敗の原因はログで確認できます。
判断条件
物体のラベル
ビジョンサービスから受信した箱のラベルによって物体をフィルタリングします。指定したラベルの物体にのみ ビジョン処理の結果によるマッチング を実行します。
ラベルを設定しないと、ビジョンサービスによって認識された箱は全部パレットパターンのマッチングに使用されます。
配置された対象物の順序をチェック
デフォルトではチェックが入っています。継続パレタイジングを実行する時に配置済み箱の順序をチェックします。
継続パレタイジング番号:連続する番号でなければなりません。また、番号 1 は空ではありません。要件を満たさない時にプロンプトメッセージが表示されます。
例:下図に示すように、10 個の箱がある段に対し、把持する順番を計算します。
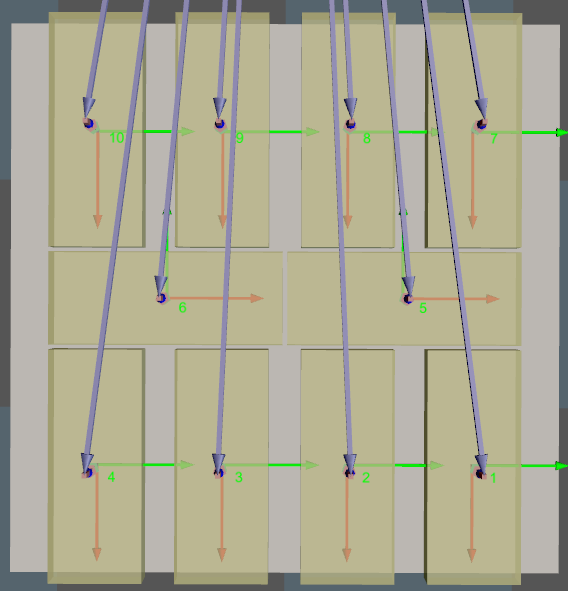
-
番号 1 に箱がまだ配置されず、2 と 3 には箱が配置されています。するとプロンプトメッセージが表示されます。
-
番号 1、2、3、4、6 に箱が配置され、5 には箱が配置されていません。するとプロンプトメッセージが表示されます。
-
番号 1 から箱が連続して配置されている場合に正常に実行できます。