デパレタイズ用吸盤(単一把持)
「実行モード」「にデパレタイズ用吸盤(単一把持)」を選択した場合に以下のパラメータを調整できます。
吸盤オフセット‐オフセット方法
吸盤により箱をデパレタイズする現場では、使用する吸盤の構造は変更できず交換もできませんが、寸法が異なる箱を処理します。 対象外の箱を吸着することを回避するために、吸盤のオフセットが必要となります。
吸盤のオフセットは 3つの方法があります:「デフォルト」、「カスタマイズ戦略優先度」、「エッジ/コーナーのシーケンスによって」。
カスタマイズ戦略優先度
ユーザーが指定した優先度に従って把持します。
戦略の優先度
中心合わせ、辺の中心合わせ、コーナー合わせという 3つの戦略を選択できます。
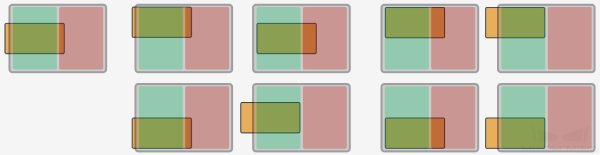
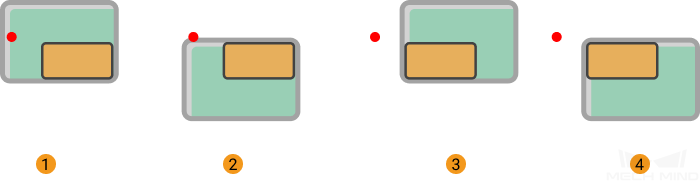
下図では、黄色い長方形は箱を、灰色の長方形は吸盤を表します。灰色の長方形の緑の部分はオンにしたブロックで、赤い部分はオフにしたブロックです。

-
1つのブロックをオンにした場合
以下では、左のイメージ図は中心合わせ把持で、中のイメージ図は辺の中心合わせ把持で、右はコーナー合わせ把持です。
-
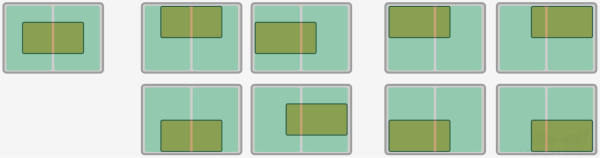
2つのブロックともオンにした場合
以下では、左のイメージ図は中心合わせ把持で、中のイメージ図は辺の中心合わせ把持で、右はコーナー合わせ把持です。
-
より多くのブロックをオンにした場合はこれによって類推します。
箱落下の検出
吸盤底部に取り付けられたセンサー(DI)を利用して箱の落下を検出します。
吸盤コンフィギュレータで DI の位置を指定すると、箱の把持を計画する時に箱をカバーしたセンサーを自動的に判別することで検出が必要な DI 信号を自動的に計算します。
同じ位置姿勢で把持することを回避
把持に失敗した場合に使用し、失敗した位置で繰り返して把持することを回避します。
破棄する範囲の半径上限
| 初期値 |
0 |
| 調整説明 |
前回把持を実行した位置姿勢との距離が指定した値より小さい位置姿勢に対し、直ちに破棄します。 |
| 例 |
クランクシャフトを把持するとします。最初の把持に失敗し、クランクシャフトがロボットハンドに触れられて位置が変わりました。次回の把持に成功する可能性があるので 優先度を減少する範囲の半径上限 を設定して破棄せずに優先度を下げます。初回の把持にクランクシャフトの位置が変わらない場合は、次回の把持でも成功する可能性がないので 破棄する範囲の半径上限 を設定して直ちに破棄します。 |