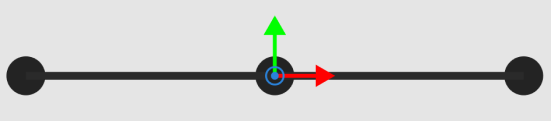
配列タイプグリッパ
今、単列の吸盤のみをサポートしています。
マッチング条件
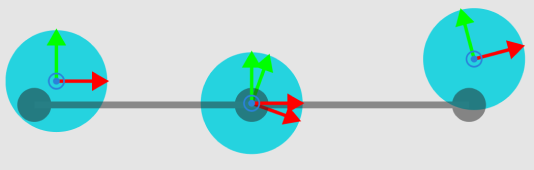
距離しきい値
| 調整説明 |
位置姿勢を円心に、距離しきい値を半径をに円を描いて把持位置の範囲とします。 |
| 調整の例 |
|
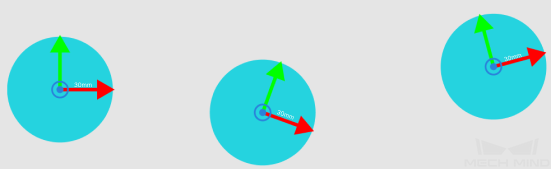

角度しきい値
| 調整説明 |
把持点と吸盤位置姿勢との角度を調整します。 |
| 調整の例 |
|
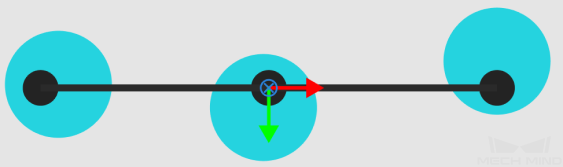
今、単列の吸盤のみをサポートしています。
| 調整説明 |
位置姿勢を円心に、距離しきい値を半径をに円を描いて把持位置の範囲とします。 |
| 調整の例 |
|
| 調整説明 |
把持点と吸盤位置姿勢との角度を調整します。 |
| 調整の例 |
|