点群の法線ベクトルを計算してエッジを推定
機能
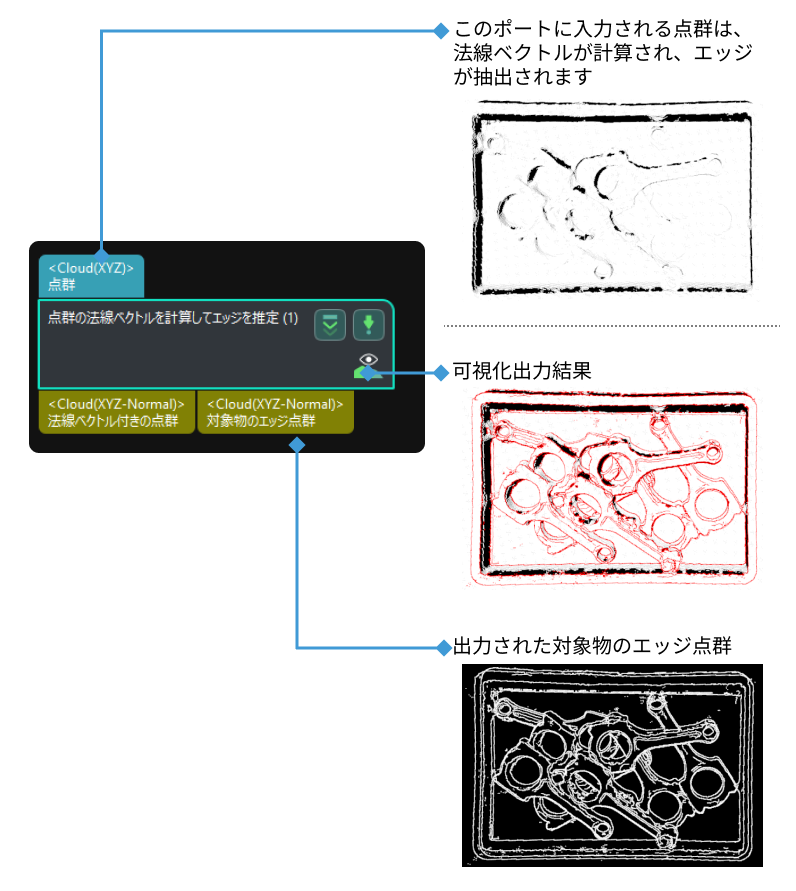
このステップは、法線ベクトルを計算し、点群内の対象物エッジを推定することでエッジ点群を出力できます。
主な流れは、入力点群を深度画像に変換し、点群の法線ベクトルと深度情報を用いて、どの点がエッジ点ポイントであるかを判定します。
パラメータの説明
このステップは、実行中に法線ベクトルの計算とエッジ抽出の2つの処理からなり、それぞれの処理流れとパラメータは以下の通りです。
法線ベクトルの計算
法線ベクトルの計算方法
パラメータ説明:このパラメータは、法線ベクトルの計算を選択するために使用されます。
オプション:CloudPreprocessingGPU、CloudXYZToCloudNormal、NormalEstimation
-
CloudPreprocessingGPU:この方法は、法線を計算して入力を変換します。GPUが存在し、法線ベクトルの情報を必要とする場合に推奨されます。
-
CloudXYZToCloudNormal:この方法は、実際の法線ベクトルを計算することなく、簡単かつ高速に型変換を行うことができます。この方法を選択した場合、パラメータの設定は必要ありません。
-
NormalEstimation:通常の方法となります。法線ベクトルの情報を必要としているが、GPUが存在しない場合に選択することができます。この方法を選択した場合、パラメータの設定は必要ありません。
調整アドバイス:実際のニーズに応じて選択してください。
計算設定
- バッチ処理
-
このパラメータは、点群のバッチ処理をするかどうかを設定するために使用されます。
初期値:チェックを入れない。
調整アドバイス:点群内の点数がが多く、メモリが小さい場合にこのパラメータにチェックを入れる必要があります。
- 法線ベクトルを計算するときの半径
-
パラメータ説明:このパラメータは、法線ベクトルを計算するときの検索半径を設定するために使用されます。検索半径内の点は法線ベクトルの計算に使用されます。単位はミリメートル(mm)です。
初期値:15.000mm
調整アドバイス:実際の状況に応じて設定してくだい。
凹凸点除去設定(すべてのパラメータを表示した場合にのみ設定可能)
- 凹凸点を除去
-
パラメータ説明:このパラメータは、凹凸点を除去するかどうかを設定するために使用されます。チェックを入れた後、設定された 凹凸点を除去するための検索半径 、 凹点除去しきい値 、 凸点除去しきい値 に従って凹凸点を除去します。
初期値:チェックを入れない。
調整アドバイス:実際の状況に応じて設定してくだい。
- 凹凸点を除去するための検索半径
-
パラメータ説明:このパラメータは、凹凸点を除去するための検索半径を設定するために使用されます。このステップでは、この検索半径内の凹凸点を除去します。単位はミリメートル(mm)です。
初期値:20.000mm
調整アドバイス:実際の状況に応じて設定してくだい。
- 凹点除去しきい値
-
パラメータ説明:このパラメータは、凹点を除去する場合、検索半径内の点の凹み値の最大値を設定するために使用されます。現在の点の検索半径内にある点の凹み値がこのしきい値より小さい場合、その点は破棄されます。
初期値:1.0000
調整アドバイス:実際の状況に応じて設定してくだい。
- 凸点除去しきい
-
パラメータ説明:このパラメータは、凸点を除去する場合、検索半径内の点の凸度の最大値を設定するために使用されます。現在の点の検索半径内にある点の凸度がこのしきい値より小さい場合、その点は破棄されます。
初期値:1.0000
調整アドバイス:実際の状況に応じて設定してくだい。
外れ値の除去設定
- 外れ値を除去
-
パラメータ説明:このパラメータは、外れ値を除去するかどうかを設定するために使用されます。チェックを入れ後、設定された 外れ値を除去するための検索半径 と 外れ値のしきい値 に従って外れ値を除去します。
初期値:チェックを入れない。
調整アドバイス:実際の状況に応じて設定してくだい。
- 外れ値を除去するための検索半径
-
パラメータ説明:このパラメータは、外れ値を除去するための検索半径を設定するために使用されます。検索半径内の点は、外れ値の除去に使用されます。単位はミリメートル(mm)です。
初期値:10.000mm
調整アドバイス:実際の状況に応じて設定してくだい。
- 外れ値のしきい値
-
パラメータ説明:このパラメータは、外れ値を除去する場合、検索半径内の点数の最小値を設定するために使用されます。検索半径内の点の数がこのしきい値より少ない場合、その点は外れ値であるとみなされます。
初期値:0
調整アドバイス:実際の状況に応じて設定してくだい。
エッジ抽出
このステップでは、エッジポイントを判定するための3つの方法が用意されています。
-
法線ベクトルの変動しきい値に基づいてエッジポイントであるかどうかを判定します。
-
深度差のしきい値に基づいてエッジポイントであるかどうかを判定します。
-
点のZ軸と法線ベクトルとの最大角度に基づいてエッジポイント以外の点を判定します。
エッジポイントの判定では、まず、 法線ベクトルとZ軸との最大角度 パラメータを使用してエッジポイント以外の点を判定し、 法線ベクトルの変動しきい値 と 深度差のしきい値 パラメータを使用して残りの点のうちどれがエッジポイントであるかを判定します。ある点がエッジポイントと判定される条件は、 法線ベクトルの変動しきい値 と 深度差のしきい値 条件の両方を満たしていることです。
|
パラメータ 深度差のしきい値 、 ギャップ幅の許容範囲 、 エッジポイントの最小数 和 法線ベクトルとZ軸との最大角度 は、 すべてのパラメータを表示 が設定された場合にのみ表示されます。 |
- 非構造化点群を処理
-
パラメータ説明:このパラメータは、非構造化点群を処理するかどうかを選択するために使用されます。
初期値:チェックを入れない(ほとんどの場合に適用可能)。
調整アドバイス:入力点群が非構造化点群の場合、このオプションにチェックを入れてください。また、チェックを入れた場合は 法線ベクトルの変動しきい値 などのパラメータに加え、 深度画像の解像度 の設定も必要です。
- 法線ベクトルの変動しきい値
-
パラメータ説明:このパラメータは、エッジポイントを判定するための法線ベクトルの変動しきい値を設定するために使用されます。単位は度(°)です。隣接する点の法線ベクトルの変動がこのしきい値より大きい場合、、その点はエッジポイントと見なされます。法線ベクトルの変動とは、隣接点の法線ベクトル変動を総合的に考慮した値をいいます。
初期値:10°
- 深度画像の解像度
-
パラメータ説明:入力点群が非構造化点群の場合、点群から深度画像への変換には、深度画像の解像度を指定する必要があります。解像度とは、単位長さあたりのピクセル数のことです。単位長さは1mです。非構造化点群が入力された場合、このパラメータの設定が必要です。
初期値:1000(ほとんどの場合に適用可能)。
調整アドバイス:入力点群の点密度が大きい場合は、このパラメータを上げ、点密度が小さい場合は、このパラメータを下げてください。
- 深度差のしきい値
-
パラメータ説明:このパラメータは、エッジポイントを判定するの深度差の上限を設定するために使用されます。単位はミリメートル(mm)です。隣接する8点との深度差の最大値がこのしきい値より大きい場合、エッジポイントと見なされます。
初期値:5mm
- ギャップ幅の許容範囲
-
パラメータ説明:点群にギャップがある場合、このパラメータを使用してギャップ両側にエッジがあるかどうかを判定します。単位はピクセル(px)です。ギャップの水平方向の幅がこのパラメータの値より小さく、ギャップ両端の高さの差が 深度差のしきい値 より小さい場合、ギャップ両側はエッジとみなされません。
初期値:2px
- エッジポイントの最小数
-
パラメータ説明:このパラメータは、このステップで出力されるエッジ点群の最小点数を設定するために使用されます。このパラメータより少ない点数のエッジ点群は無視されます。
初期値:10
- 法線ベクトルとZ軸との最大角度
-
パラメータ説明:このパラメータは、Z軸と点の法線ベクトルとの角度の最大値を設定するために使用されます。単位は度(°)です。Z軸と点の法線ベクトルとの角度がこの値より大きい場合、その点はエッジポイントと見なされません。
初期値:70°(ほとんどの場合に適用可能)。